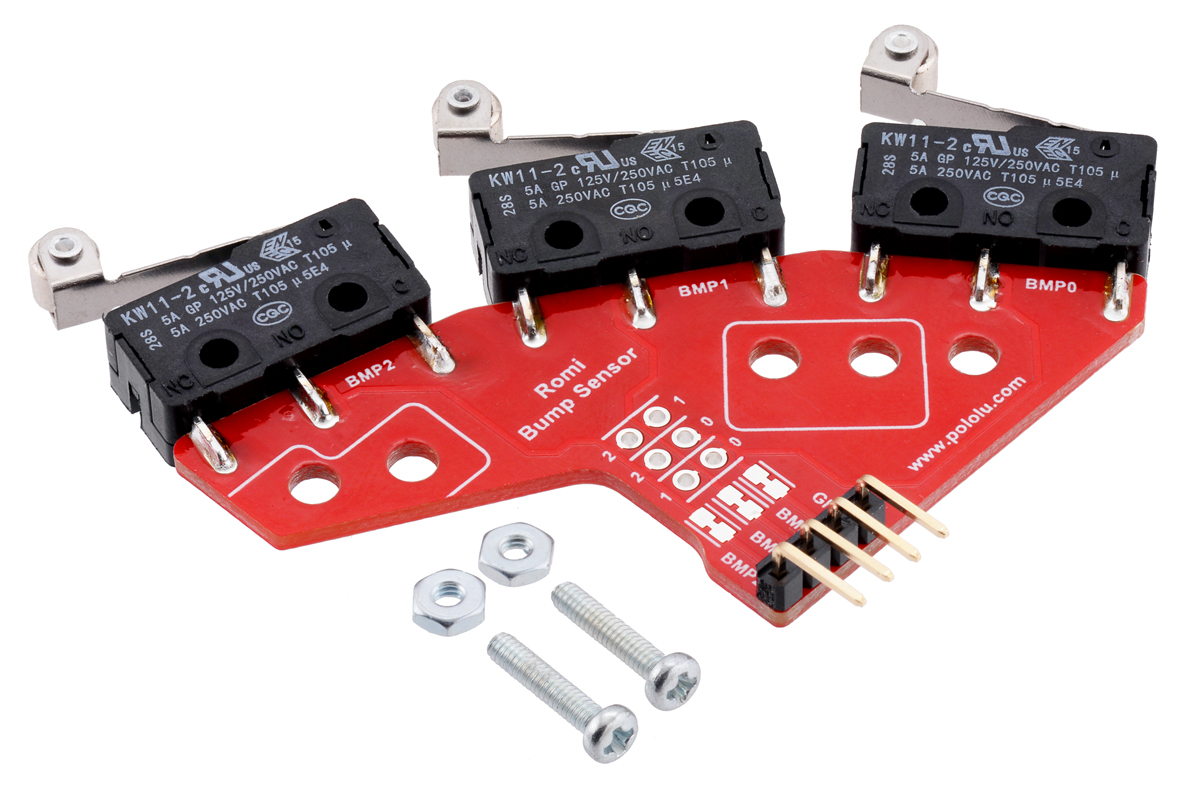


The 3674-POLOLU is a bump sensor for the Romi or TI-RSLK MAX robots. It uses six snap-action switches to determine if there's an obstacle on its way or not.
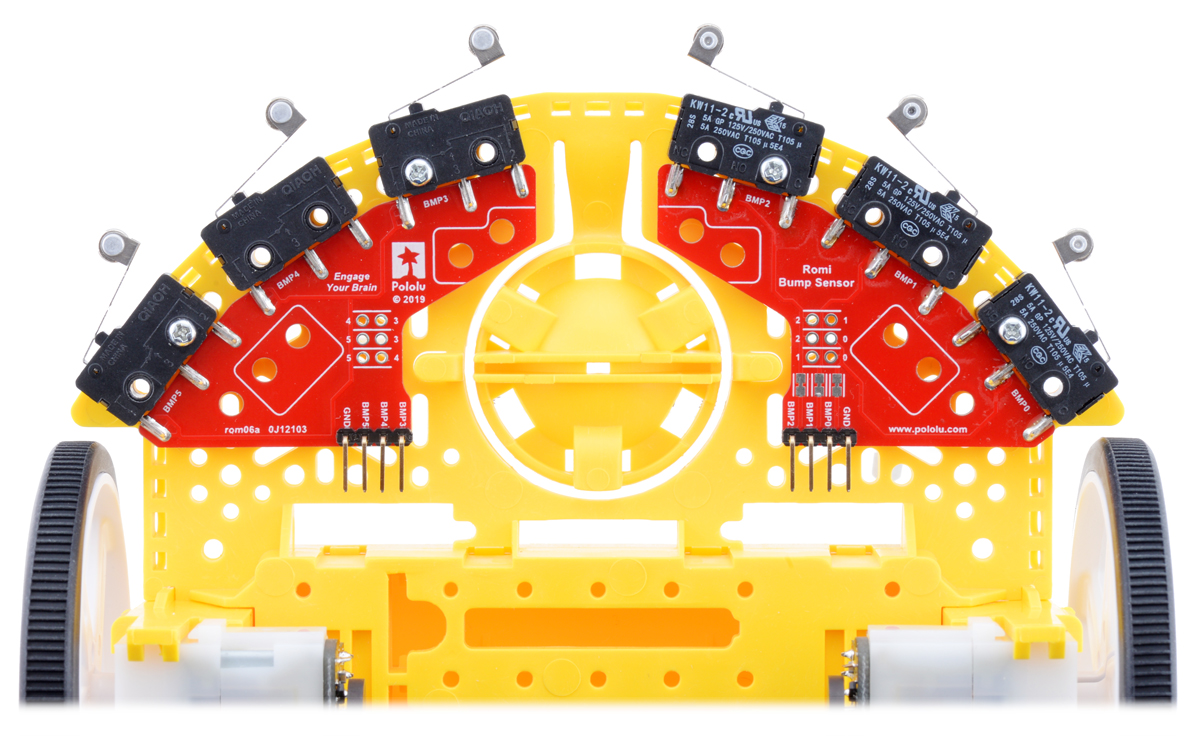
These bump sensor modules for Romi or TI-RSLK MAX robots can be used to mount total of six snap-action switches with roller levers along the front half of the Romi chassis, enabling the robot to determine where it has encountered an obstacle based on which switches get depressed. The modules are intended to be used in pairs, with one mounted on the left front edge of the robot and another mounted on the right front edge.
The right-angle pins included with the module have custom dimensions designed specifically for use with corresponding female headers on the TI-RSLK Chassis Board v1.0, but they still have a 0.1″ pitch that is compatible with standard 0.1″ female headers, jumper wires, and connectors.
DETAILS
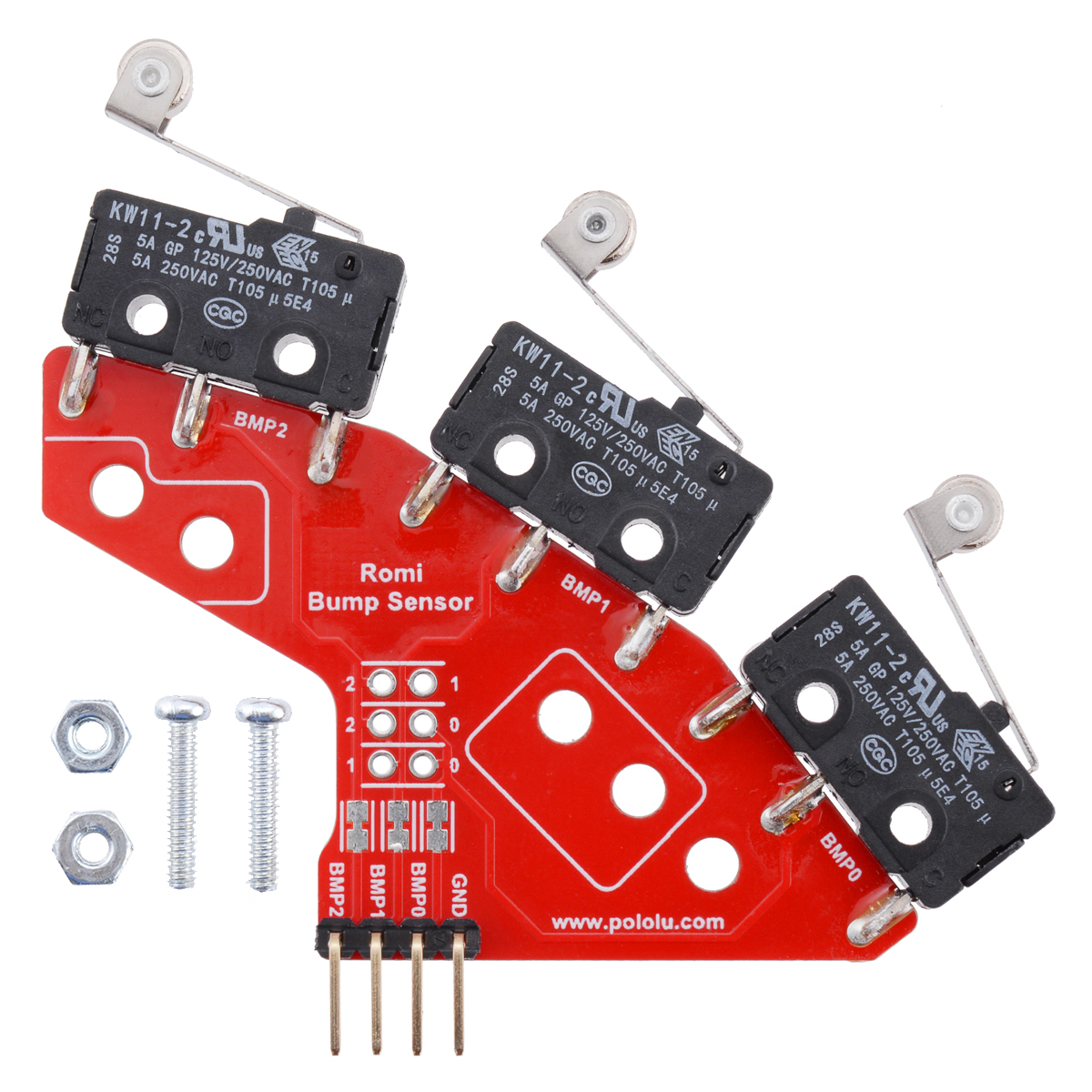
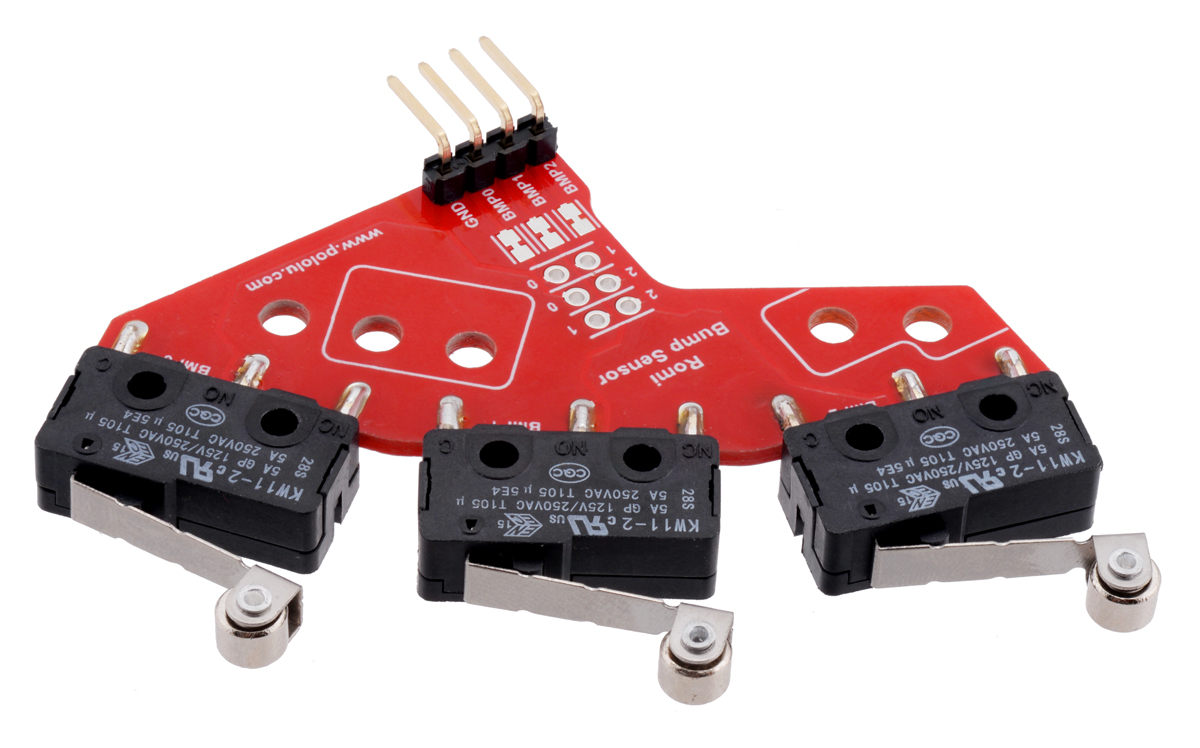
This bumper switch module version is fully assembled for use on the right front side of the Romi chassis, and it is intended to be paired with a Left Bumper Switch Assembly. No soldering is required to use it.
Using the module
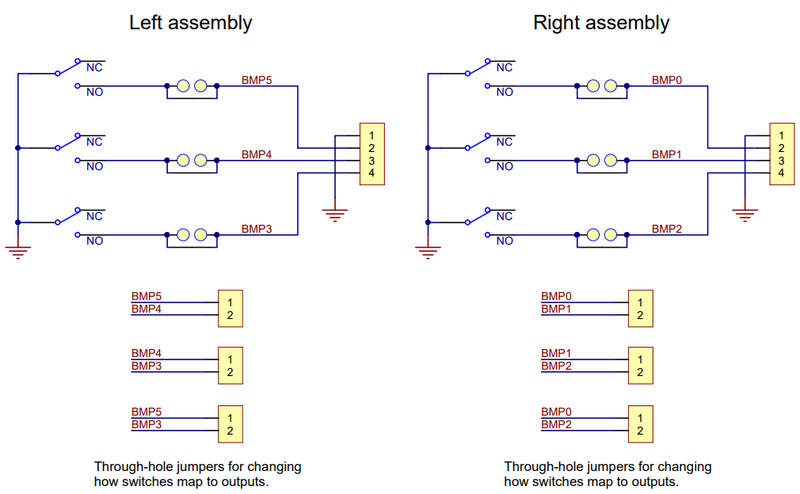
Each of the module’s three BMPx outputs connect to the normally open (NO) pin of the correspond snap-action switch, so pull-up resistors should be used to give each pin a default high state (or the outputs should be connected to digital inputs with their internal pull-ups enabled). When the switch is depressed, the corresponding output is driven low.
Customizing the outputs
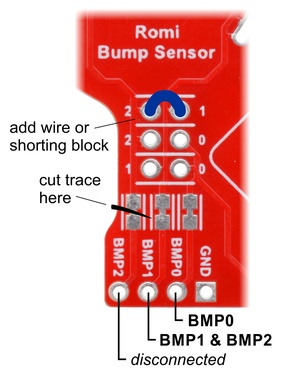
For applications where available I/O lines are limited and it is not important to detect which specific switch was closed, multiple switches can be connected to a single output using pairs of through-holes on the PCB. This makes it possible to reduce the module to a pair of signals (with one combining the outputs of two different switches), or even to a single signal that indicates if any of the three switches has been triggered. The board also features designated places where traces can be cut with a knife to disconnect outputs from their corresponding switches, enabling any I/O lines connected to those outputs to be used for other things (those designated cutting points are between surface-mount jumpers that can later be bridged with solder to restore the connection).
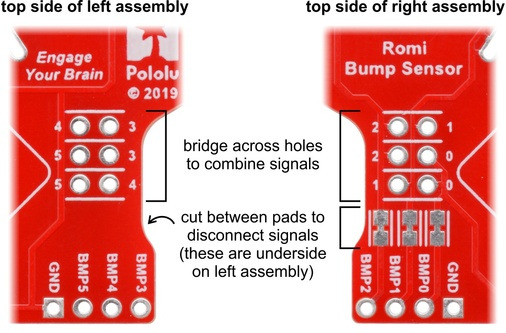
The following example shows how you could modify a unit to disconnect switch 2 from the BMP2 output and instead combine it with switch 1 on the BMP1 output. In this configuration, if either switch 1 or 2 is pressed, the BMP1 output will go low.
Mounting to the Romi chassis
Two #2-56 7/16″ screws and nuts are included for mounting the bumper switch assembly to the Romi chassis.
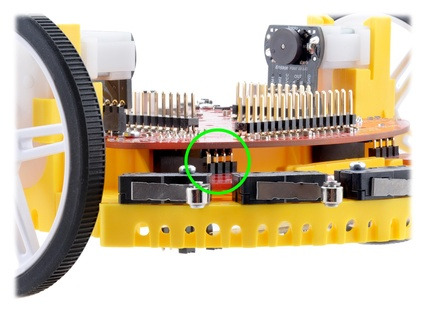
If you are using these bumper switch assemblies with the TI-RSLK Chassis Board v1.0, the Chassis Board must be installed on the Romi chassis first. You can then slide each bumper switch assembly underneath the front edge of the Chassis Board until the right-angle male header plugs into the corresponding female header on the underside of the Chassis Board as shown below:
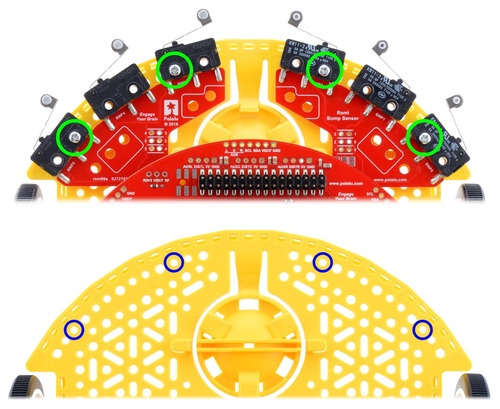
The bumper switch assemblies mount to the Romi chassis using the mounting holes in the roller switches highlighted in the diagram below:
Schematic diagram