
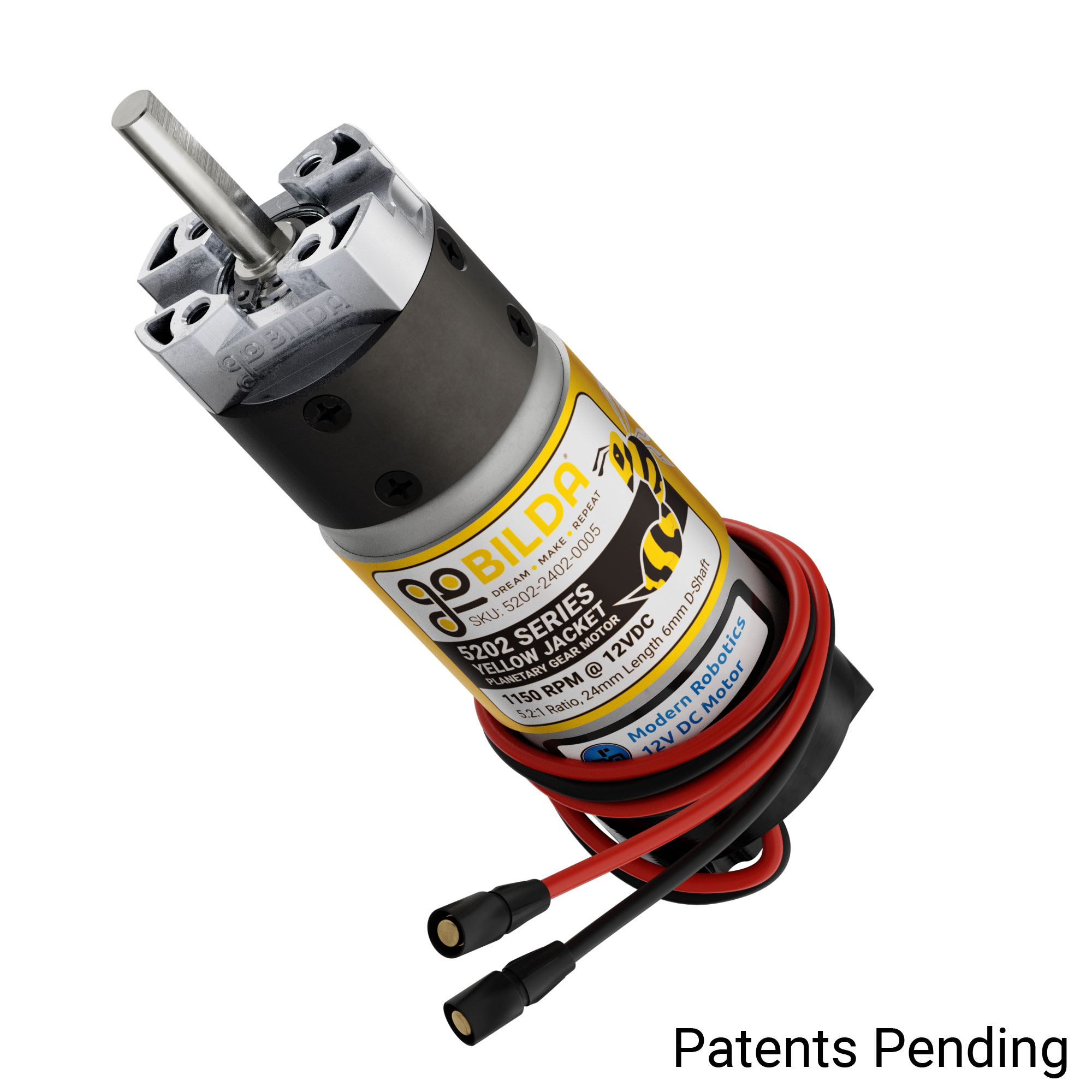

5202 Series Yellow Jacket Planetary Gear Motor (5.2:1 Ratio, 24mm Length 6mm D-Shaft, 1150 RPM, ⌀36mm Gearbox, 3.3 - 5V Encoder) (goBILDA)
This 5.2:1 ratio gear motor runs at a no-load speed of 1150RPM when 12VDC is applied. Mounted to the back of the Modern Robotics/MATRIX 12VDC Motor driving its gearbox is a quadrature encoder able to run on both 3.3V and 5V. Its bullet connectors are a reliable connection style that allows you to easily reverse polarity to the motor and pass its wires through 14mm holes in goBILDA® channel, even when grommets are installed.
Specs
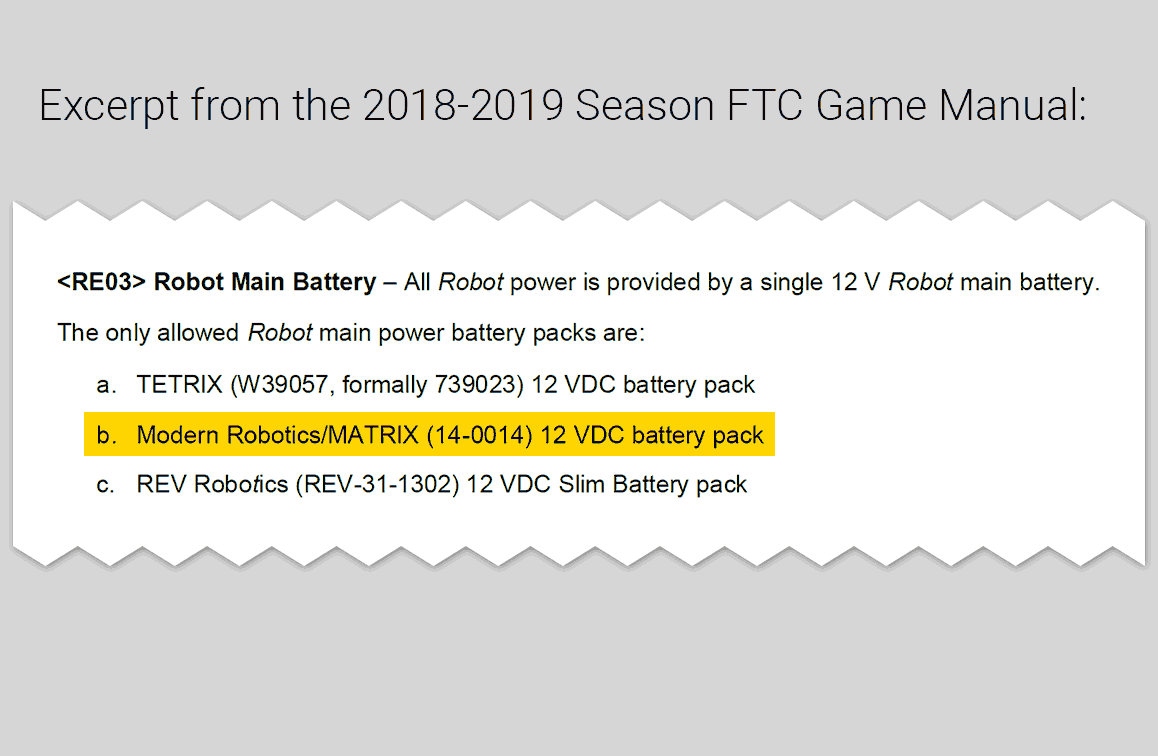
| Voltage (Nominal) | 12VDC |
|---|---|
| No-Load Speed @ 12VDC | 1,150 RPM |
| No-Load Current @ 12VDC | 0.25A |
| Stall Current @ 12VDC | 9.2A |
| Stall Torque @ 12VDC | 109 oz-in (7.9 kg.cm) |
| Gear Ratio | 5.2:1 |
| Gear Material |
Casing: Steel Ring Gear |
| Gearbox Style | Planetary |
| Motor Type | Brushed DC |
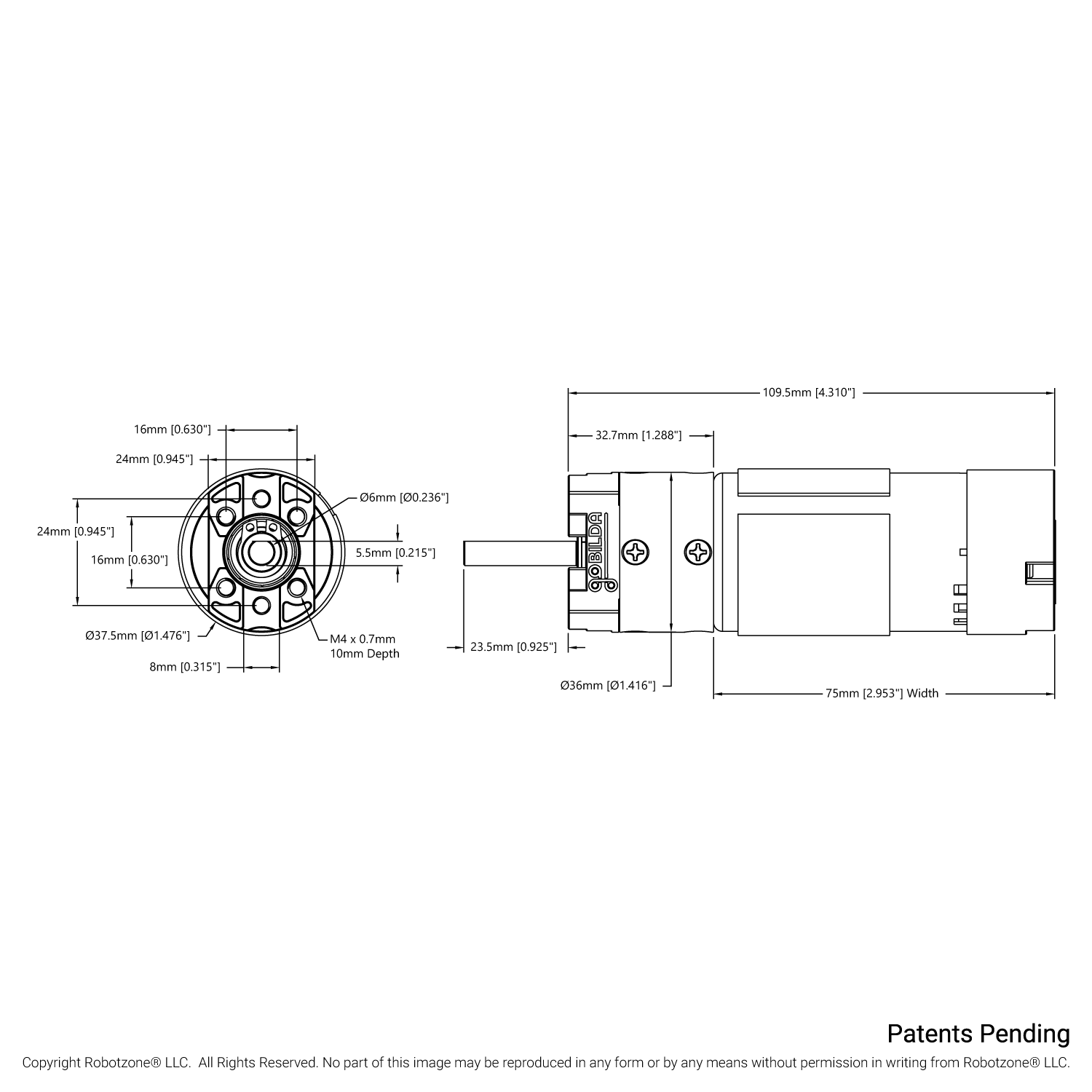
| Output Shaft Diameter | 6mm (0.236”) |
| Output Shaft Style | D-shaft |
| Electrical Connection | 3.5mm FH-MC Bullet Connectors |
| Wire Length | 470mm (including connectors) |
| Wire Gauge | 16AWG |
| Weight | 398g (14.03oz) |
| Encoder: Cycles Per Revolution (Motor Shaft) | 7 (Rises of Ch A) |
| Encoder: Cycles Per Revolution (Output Shaft) | 36.4 (Rises of Ch A) |
| Encoder: Countable Events Per Revolution (Motor Shaft) | 28 (Rises & Falls of Ch A & B) |
| Encoder: Countable Events Per Revolution (Output Shaft) | 145.6 (Rises & Falls of Ch A & B) |
| Encoder Type | Relative, Quadrature |
| Encoder Sensor Type | Magnetic (Hall Effect) |
Downloads


