





ZK-SMC02 is an operation control module specially designed for single-axis stepper motors. The module has built-in multiple fixed operation modes, and the user can quickly select the appropriate motion trajectory.It can save the setting parameters after power off.
It enables you to set distance/speed/delay/cycle times. It can run independently as a module, or it can be used in conjunction with other systems.
Features:
- Integrated step motor controller and driver functions.
- Motor forward and reverse control.
- Control Mode
- 9 work states
- HD LCD display
Parameters:
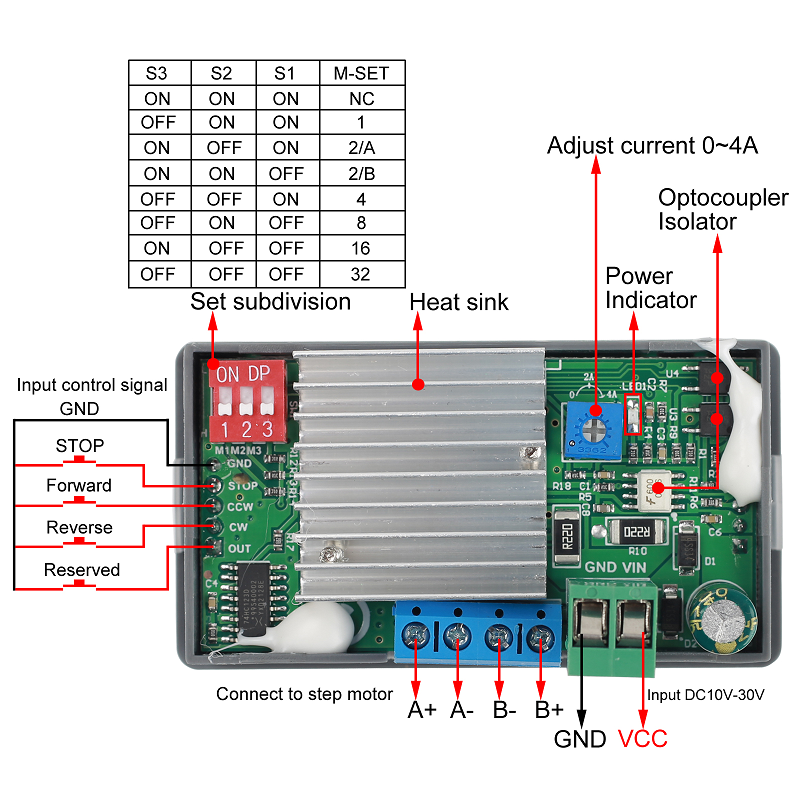
- Input Voltage: DC 10V-30V
- Output/Driver Current: 4A (Max)
- Control Shafts: Single axis
- Suitable Motor: 42/57 step motor (Nema17/23 motor)
- Control Speed: 0.1-999RPM
- Forward Pulses Number: 1-9999
- Reverse Pulses Number: 1-9999
- Loop Times: 1-9999
- Forward delay time: 0.0-999.9s
- Reverse delay time: 0.0-999.9s
- Subdivision:1/2/4/8/16/32
- Acceleration and Deceleration Control: Yes
- Input Reverse Polarity Protection: Yes
- Control Modes: Auto/Manual/Setup
- Work Temperature: -20℃ ~ 85℃
- Work Humidity: 5% ~ 95%RH
- Module Size: 79 x 43 x 41mm
Setting methods:
1. Running interface:
1.1>.The first line displays rotating speed in RPM.
1.2>.The second line displays delay time or loop times which can be set by F-10 menu.
1.3>.Press CW button to clockwise/forward rotating.
1.4>.Press CCW button to counterclockwise/reverse rotating.
1.5>.Press RUN/STOP button to start or stop rotating.
1.6>.Rotate the potentiometer to change the forward or reverse rotation speed. Note:the operation mode is different in different modes.
1.7>.Keep press potentiometer more than 3second enter into parameter set mode.
2. Parameter interface:
2.1>.Rotate the potentiometer to change parameter F-01~F-13 after enter parameter set mode.
2.2>.The selected parameter keeps blinking.
2.3>.Press potentiometer to selected parameter value.
2.4>.Modify Value Method 1: Directly rotate the potentiometer to change value.
2.5>.Modify Value Method 2: Press the potentiometer again and the selected bit keep blinking. Then rotate the potentiometer to change value for this bit form 0 to 9. Modify other bits in the same method which can improve setup efficiency and save your time.
2.6>.Press RUN/STOP button return to parameter(Note:parameter and parameter value are not the same).
2.7>.Set others parameters and parameters value if needs.
2.8>.Save and exit parameter set mode after keep press potentiometer more than 3second.
3. Auxiliary function:
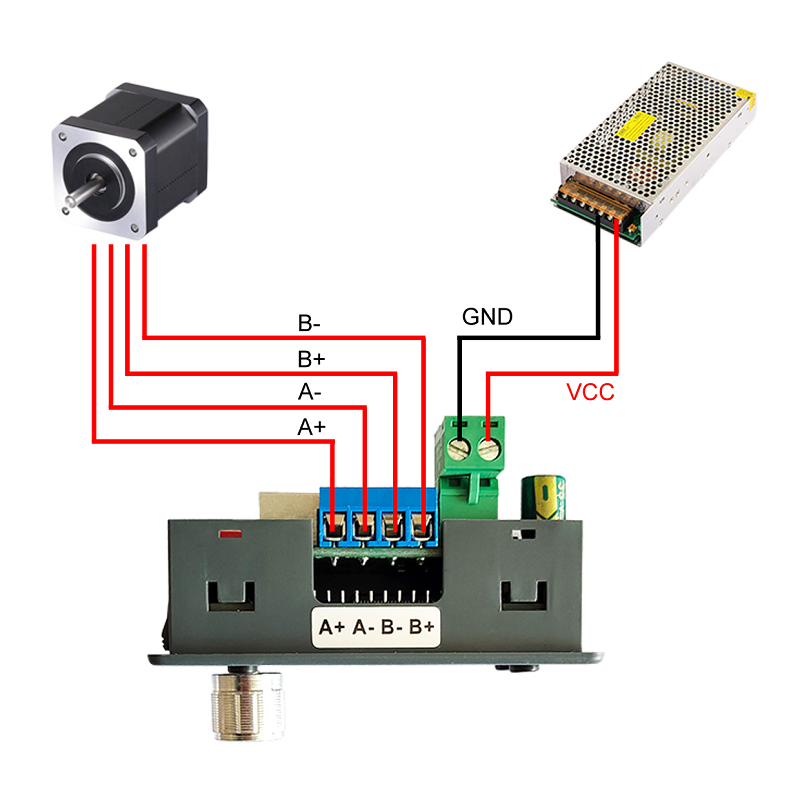
3.1>.It can work independently by default, only need to connect the power supply and stepper motor, and no longer need to connect other accessories.
3.2>.Users can also connect external control buttons to change the operation mode. External control buttons can input from COM/STOP/CCW/CW/OUT terminal on PCB.
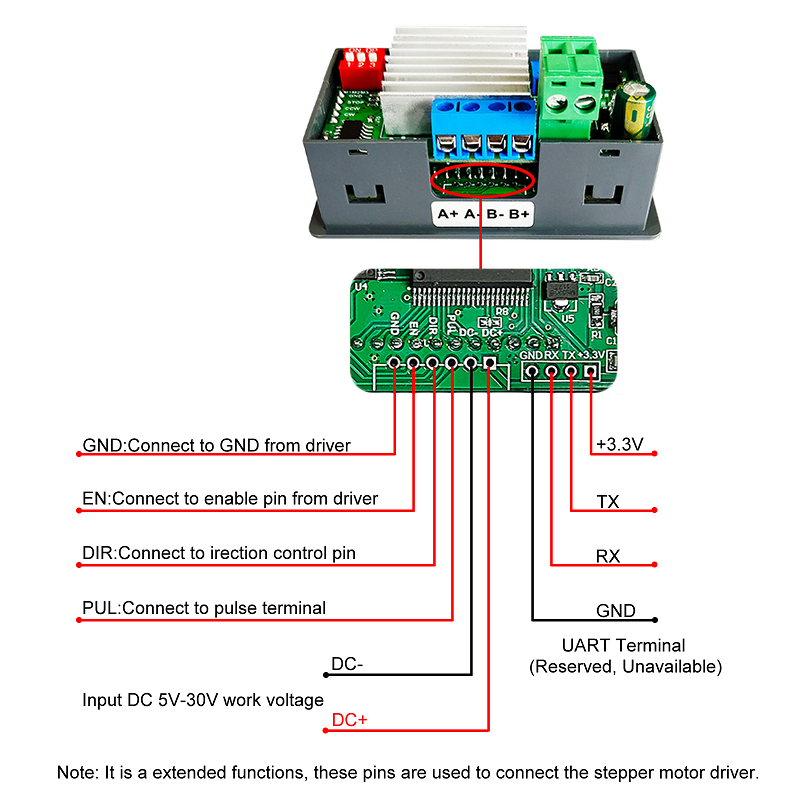
3.3>.Users can also connect other types of stepper motor driver and just use ZK-SMC02 alone as a stepper motor controller.Auto/Manual/Setup
4.Work Mode:
4.1>.Automatic Control Mode: Step motor works with ZK-SMC02’s parameters set.
4.2>.Manual Control Mode: This mode needs connect buttons to COM/STOP/CCW/CW terminal on ZK-SMC02.
4.3>.Setup Control Mode: This mode needs connect to others stepper motor driver and just use ZK-SMC02 alone as a stepper motor controller.
Function Parameter Table:
|
[F] Function Parameter Table |
|||
|
Parameter |
Function |
Set Ranges |
Defaults |
|
F-01->? |
Working mode selection. Refer to the Work Mode Table. |
P01~P09 |
P01 |
|
F-02 |
Forward pulsesnumber |
1~9999 |
1600 |
|
F-03 |
Forward rotation speed in RPM |
0.1~999.9 |
10 |
|
F-04 |
Reverse pulses number |
1~9999 |
1600 |
|
F-05 |
Reverse rotation speed in RPM |
0.1~999.9 |
10 |
|
F-06 |
Cycle work times(‘----’means infinite loop) |
0~9999 or infinite loop |
1 |
|
F-07 |
Forwardin-position delay in second. +/-0.2s |
0.0~999.9 |
0.0 |
|
F-08 |
Reverse in-position delay in second. +/-0.2s |
0.0~999.9 |
0.0 |
|
F-09 |
Pulse numbers for one revolution. Unit is *10. E.g. if step anglemar is 1.8 and subdivision is 8. So that the pulse numbers for one revolution is 360/1.8*8=1600. So the set value should be 160. |
1~9999 |
160 |
|
F-10 |
Set LCD display parameters: 0:1st line display motor rotating speed in rpm. 2nd line display delay time in second. 1:1st line display motor rotating speed in rpm. 2nd line display cycle work times. |
0 or 1 |
0 |
|
F-11 |
Set motor working state after press RUN/STOP button: 0:Slow down and stop. 1:Stop immediately. |
0 or 1 |
0 |
|
F-12 |
Set the acceleration/deceleration level: 001 is the slowest and 100 is the fastest. |
001~100 |
020 |
|
F-13 |
Set device address |
001~255 |
001 |
Work Mode Table:
|
Work Mode |
Work Process |
|
F-01->P01 |
1.Function:Motor works with the rotation of potentiometer. That is, motor can only be controlled by potentiometer, and other buttons are invalid. 2.Motor rotates forward and CW indicator turns ON if potentiometer is turned clockwise. 3.Motor rotates reverse and CCW indicator turns ON if potentiometer is turned counterclockwise. |
|
F-01->P02 |
1.Function:Motor rotates when keep press and stop if release button. 2.Motor rotates forward and CW indicator turns ON if keep press CW button. Motor stops if release the button.Rotating potentiometer to reset motor rotate speed in RPM. 3.Motor rotates reverse and CCW indicator turns ON if keep press CCW button. Motor stops if release the button.Rotating potentiometer to reset motor rotate speed in RPM. |
|
F-01->P03 |
1.Function:Rotates at first press and stop press again. self-locking control. 2.Motor rotates forward and CW indicator turns ON if press CW button. Motor stops if press again.Rotating potentiometer to reset motor rotate speed in RPM. 3.Motor rotates reverse and CCW indicator turns ON if press CCW button. Motor stops if press again.Rotating potentiometer to reset motor rotate speed in RPM. 4.Note:please stops motor at first when the motor is running if need change the running direction. |
|
F-01->P04 |
1.Function:Motor rotates from pulsesnumberF-02/F-04, then stop. Then loop F-06 times. 2.Press CW button, then motor keep rotates forward from F-02, Then stop for delay time F-07.Then loop like this. Loop time from F-06. E.g. Forward->OFF->....->Forward->OFF. 3.Press CCW button, then motor keep rotates reverse from F-04, Then stop for delay time F-08.Then loop like this. Loop time from F-06. E.g. Reverse->OFF->....->Reverse->OFF. 4.Rotating potentiometer to reset motor rotate speed in RPM. 5.Note:please stops motor at first when the motor is running if need change the running direction. |
|
F-01->P05 |
1.Function:Motor rotates from pulsesnumberF-02/F-04, then stop. Then loop F-06 times.Then running and return to start positive in the opposite direction. 2.Press CW button, then motor keep rotates forward from F-02, Then stop for delay time F-07.Then loop like this. Loop time from F-06. Then reverse return to start positive. E.g. Forward->OFF->....->Forward->OFF->Reverse. 3.Press CCW button, then motor keep rotates reverse from F-04, Then stop for delay time F-08.Then loop like this. Loop time from F-06. Then forward return to start positive. E.g. Reverse->OFF->....->Reverse->OFF->Forward. 4.Rotating potentiometer to reset motor rotate speed in RPM. 5.Note:please stops motor at first when the motor is running if need change the running direction. |
|
F-01->P06 |
1.Function:Motor rotates from pulsesnumberF-02/F-04,then stop and change rotation direction. Then loop F-06 times. 2.Press CW button, then motor keep rotates forward from F-02, then stop for delay time F-07,then reverse from F-04,then stop for delay time F-08. Then loop like this. Loop time from F-06. E.g. Forward->OFF->Reverse->OFF....->Reverse->OFF->Forward->OFF. 3.Press CCW button, then motor keep rotates reverse from F-04, then stop for delay time F-08,then reverse from F-02,then stop for delay time F-07. Then loop like this. Loop time from F-06. E.g. Reverse->OFF->Forward->OFF....->Forward->OFF->Reverse->OFF. 4.Rotating potentiometer to reset motor rotate speed in RPM. 5.Note:please stops motor at first when the motor is running if need change the running direction. |
|
F-01->P07 |
1.Function:Motor rotates when keep press and stop if release button.Then running and return to start positive in the opposite direction. 2.Motor rotates forward and CW indicator turns ON if keep press CW button. Motor stops for time F-07 if release the button. Then reverse return to start positive. 3.Motor rotates reverse and CCW indicator turns ON if keep press CCW button. Motor stops for time F-08 if release the button. Then forward return to start positive. 4.Rotating potentiometer to reset motor rotate speed in RPM. |
|
F-01->P08 |
1.Function:Motor rotates from delay time F-07/F-0, then stop. Then loop F-06 times. 2.Press CW button, then motor keep rotates forward from F-07, Then stop for delay time F-08.Then loop like this. Loop time from F-06. E.g. Forward->OFF->....->Forward->OFF. 3.Press CCW button, then motor keep rotates reverse from F-08, Then stop for delay time F-07.Then loop like this. Loop time from F-06. E.g. Reverse->OFF->....->Reverse->OFF. 4.Rotating potentiometer to reset motor rotate speed in RPM. 5.Note:please stops motor at first when the motor is running if need change the running direction. |
|
F-01->P09 |
1.Function:Motor forward rotates from pulsesnumberF-02,then stop for time F-07, then rotates reverse from F-04, then stop for delay time F-08, and loop like this. Then loop F-06 times. 2.Rotating potentiometer to reset motor rotate speed in RPM. 3.Note:please stops motor at first when the motor is running if need change the running direction. |
Note:
- It is suitable for 2 phase stepper motors whether it is 4-wire or 5-wire or 6-wire or 8-wire.
- It has built-in drivers and controllers, but can also connect other drivers.
Application:
- Industrial Automation Control
- CNC machines
- Mechanical packaging
- Electronic processing and testing
- Assembly lines


