WAVE ROVER Flexible And Expandable 4WD Mobile Robot Chassis, Full Metal Body, Multiple Hosts Support, With Onboard ESP32 Module


Features At A Glance
The WAVE ROVER is a full metal body 4WD mobile robot chassis, which features superb off-road crossing ability and shock-absorbing performance, open source all code for secondary development. It supports multiple host computers (Raspberry Pi, Jetson Nano, Jetson Orin Nano, etc), the host computer can communicate with the ESP32 slave computer through the serial port. Equipped with four N20 geared motors using a high-quality gearbox, which allows the mobile robot to drive at high speed with great power. Built in 3S UPS power supply module, supports 3 x 18650 Li batteries (in series, NOT included), which provides uninterruptible power for the robot and supports charging and power output at the same time. Built in multi-functional robot driver board, based on ESP32, with onboard WIFI and Bluetooth, for driving serial bus servos, outputting PWM signal, expanding TF card slot, etc.
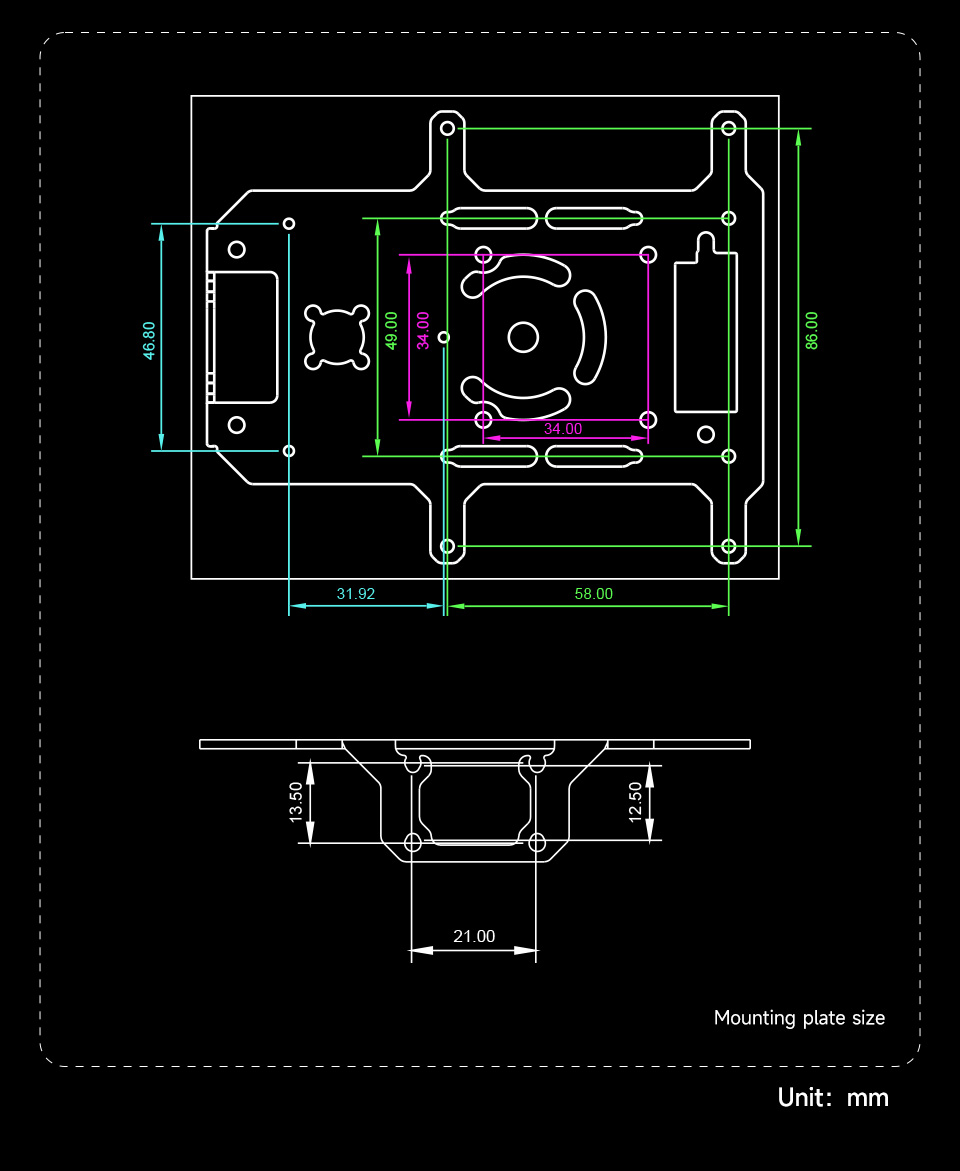
The WAVE ROVER adopts flexible rubber tires which greatly reduce the impact of complex terrains, can easily meet the needs of high-speed driving, shock absorption, and off-road. Comes with a mounting plate, can be used to install the host computers (Raspberry Pi 4B, Jetson Nano, Jetson Orin Nano, etc.), LD19/STL-27L lidar, and pan-tilt camera, providing more possibilities for secondary development.
Specifications
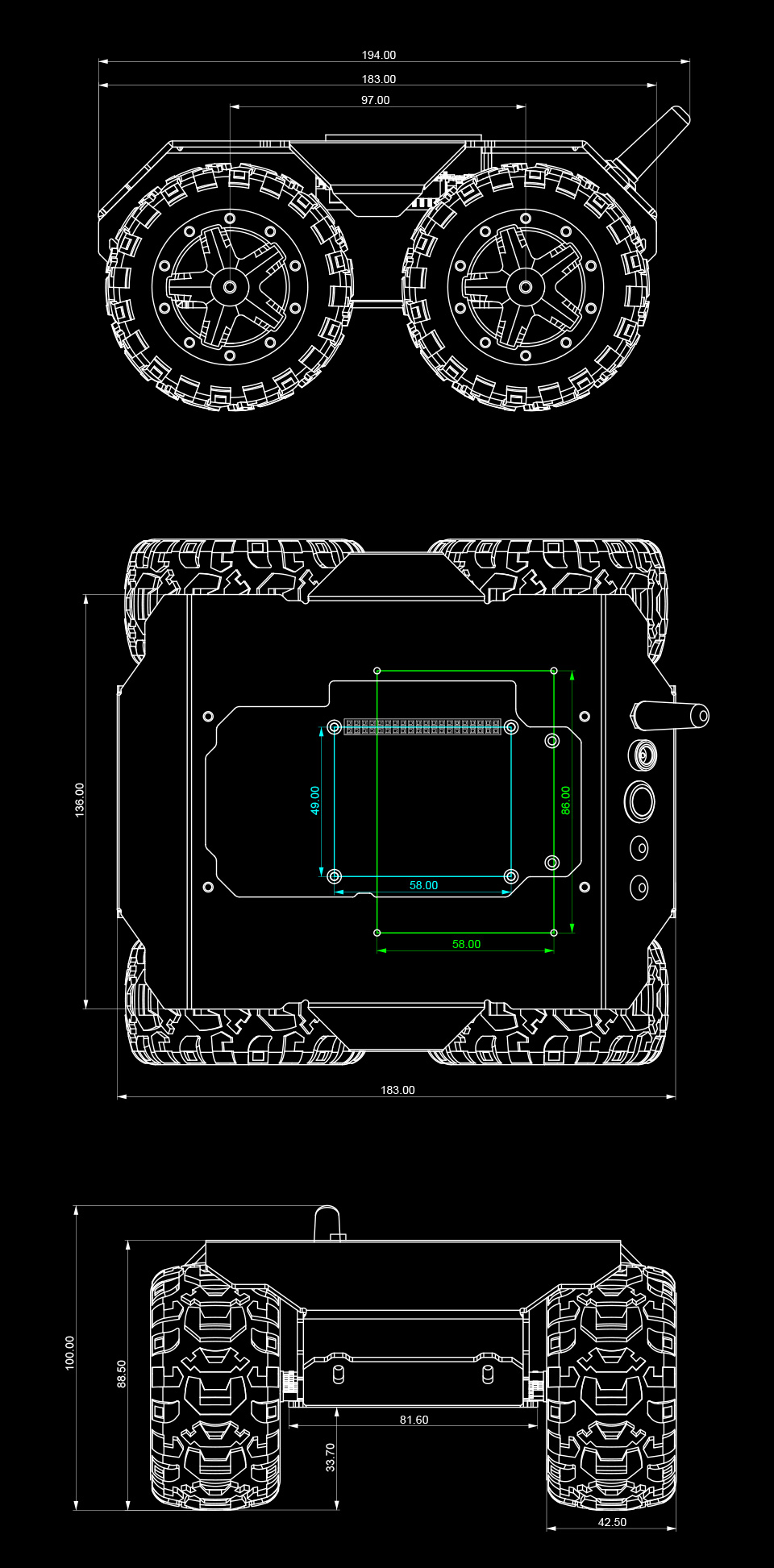
| Outline dimensions | 194×168×100mm | Tire material | Nylon wheel hub, rubber tire |
| Chassis height | 33.70mm | OLED screen | 0.91inch |
| Tire width | 42.50mm | Running speed | 1.25m/s |
| Tire diameter | 80mm | Number of driving wheels | 4 |
| Motor | N20 12V 200RPM × 4 |
Body material | 2mm (thickness) 5052 Aluminum Alloy |
| Weight | 860g | Vertical obstacle ability | 40mm |
| Driving payload | 0.8kg | Climbing ability | 22° |
| Battery support | 18650 Lithium battery × 3 (NOT Included) | Minimum turning radius | 0m (In-situ Rotation) |
| Motor power | 1.5W × 4 | Remote control function | WIFI AP/STA |
| Upper surface area | 17551mm2 | Communication interface | UART / serial bus servo interface / I2C |











① About the slave computer driver board, please refer to General-Driver-for-Robots product page for more details.
② The driver board has onboard UART to USB circuit for data transmission between Lidar and the host computer.



Dimensions