Châssis de robot mobile 4WD flexible et extensible WAVE ROVER, corps entièrement en métal, prise en charge de plusieurs hôtes, avec module ESP32 intégré


Fonctionnalités en un coup d'œil
Le WAVE ROVER est un châssis de robot mobile à 4 roues motrices entièrement en métal, qui offre une superbe capacité de franchissement hors route et des performances d'absorption des chocs, open source tout le code pour le développement secondaire. Il prend en charge plusieurs ordinateurs hôtes (Raspberry Pi, Jetson Nano, Jetson Orin Nano, etc.), l'ordinateur hôte peut communiquer avec l'ordinateur esclave ESP32 via le port série. Équipé de quatre motoréducteurs N20 utilisant une boîte de vitesses de haute qualité, ce qui permet au robot mobile de rouler à grande vitesse avec une grande puissance. Module d'alimentation 3S UPS intégré, prend en charge 3 batteries Li 18650 (en série, NON incluses), qui fournit une alimentation sans interruption pour le robot et prend en charge la charge et la puissance de sortie en même temps. Carte de pilote de robot multifonctionnelle intégrée, basée sur ESP32, avec WIFI et Bluetooth intégrés, pour piloter des servos de bus série, émettre un signal PWM, étendre la fente pour carte TF, etc.
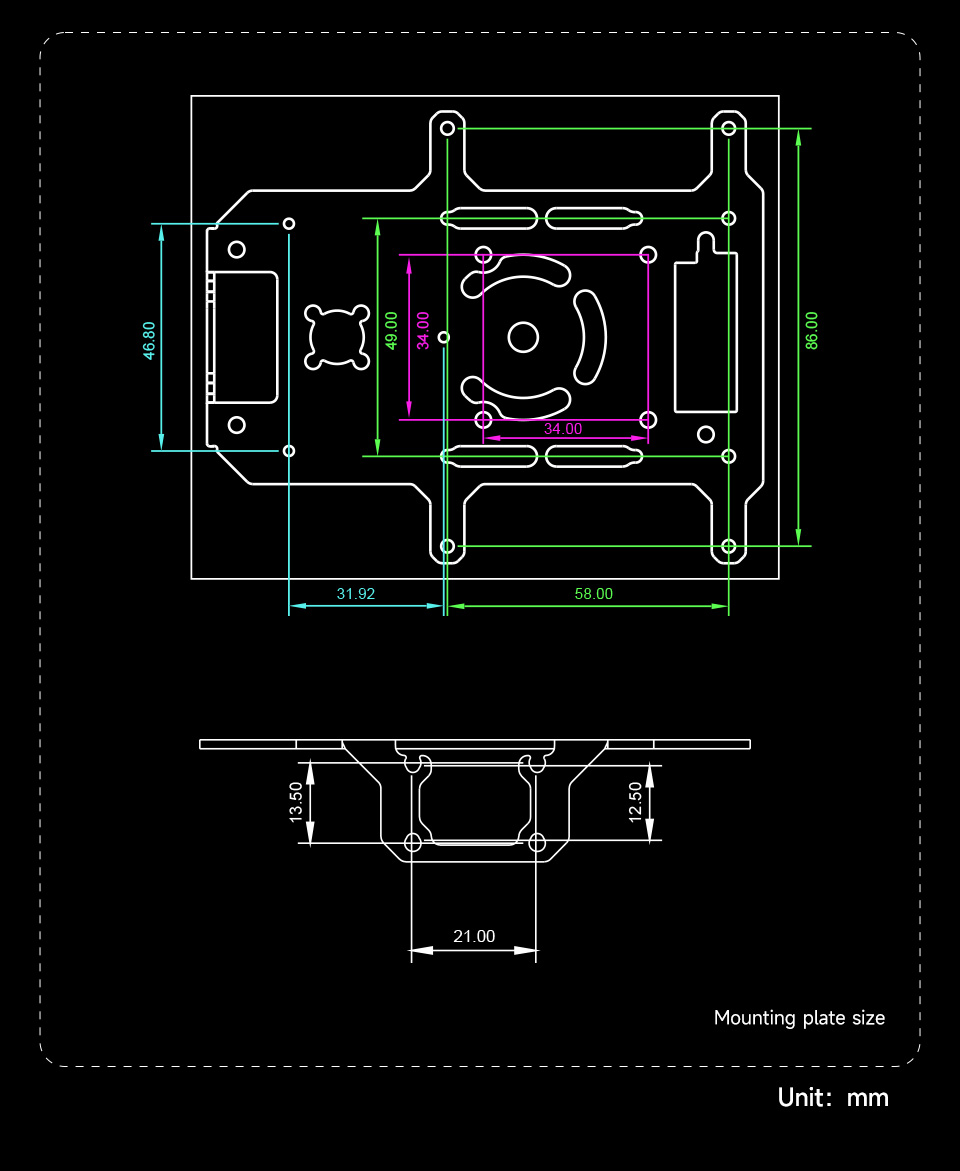
Le WAVE ROVER adopte des pneus en caoutchouc flexibles qui réduisent considérablement l'impact des terrains complexes, peuvent facilement répondre aux besoins de conduite à grande vitesse, d'absorption des chocs et de tout-terrain. Livré avec une plaque de montage, peut être utilisé pour installer les ordinateurs hôtes (Raspberry Pi 4B, Jetson Nano, Jetson Orin Nano, etc.), le lidar LD19/STL-27L et la caméra pan-tilt, offrant plus de possibilités pour le développement secondaire.
Spécifications
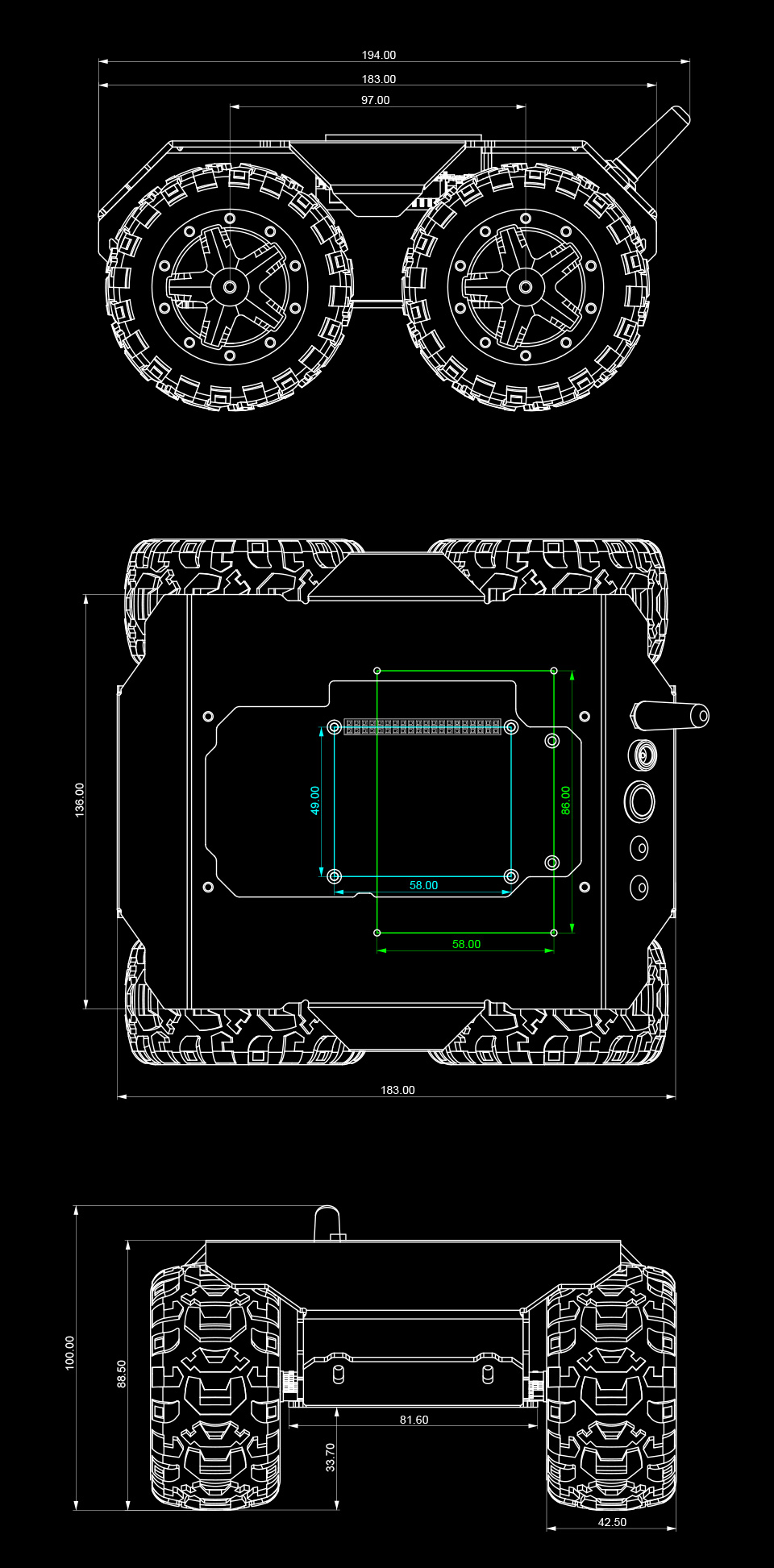
| Dimensions du contour | 194×168×100mm | Matériau du pneu | Moyeu de roue en nylon, pneu en caoutchouc |
| Hauteur du châssis | 33,70 mm | Écran OLED | 0,91 pouce |
| Largeur du pneu | 42.50mm | Vitesse de course | 1.25m/s |
| Diamètre du pneu | 80mm | Nombre de roues motrices | 4 |
| Moteur | N20 12V 200RPM × 4 |
Matériau du corps | Alliage d'aluminium 5052 de 2 mm (épaisseur) |
| Poids | 860g | Capacité d'obstacle vertical | 40 mm |
| Conduire la charge utile | 0,8 kg | Capacité d'escalade | 22° |
| Prise en charge de la batterie | Batterie au lithium 18650 × 3 (NON incluse) | Rayon de braquage minimal | 0 m (rotation in situ) |
| Puissance du moteur | 1,5 W × 4 | Fonction de télécommande | WIFI AP/STA |
| Surface supérieure | 17 551 mm2 | Interface de communication | UART / interface d'asservissement de bus série / I2C |











① À propos de la carte pilote de l'ordinateur esclave, veuillez vous référer à la page produit General-Driver-for-Robots pour plus de détails. ② La carte de pilotage dispose d'un circuit UART vers USB intégré pour la transmission de données entre Lidar et l'ordinateur hôte.



Dimensions