





Capteur de portée laser TOF (temps de vol), bus UART / CAN, prise en charge en cascade, livré avec le logiciel assistant d'ordinateur hôte
CAPTEUR DE GAMME LASER TOF
.jpg?1597257605508)
Le capteur de portée laser TOF est un capteur de télémétrie laser basé sur TOF (temps de vol) avec MCU intégré et algorithme de télémétrie, capable d'offrir une plage de mesure allant jusqu'à 5 m, une précision de ± 1,5 cm et une résolution de 1 mm. Il prend en charge la télémétrie en cascade via UART ou bus CAN, une sortie de données configurable comprenant une sortie active et une sortie de requête.
Ce capteur peut être largement utilisé dans des applications telles que la mesure de distance commune, l'évitement d'obstacles / planification d'itinéraire par un robot, ainsi que le réglage d'altitude / détection de plafond par drone, etc.
Caractéristiques
| TYPICAL MEASURING RANGE | Short range: 0.012~2.16m |
|---|---|
| Mid range: 0.012~3.60m | |
| Long range: 0.01~5.00m | |
| TYPICAL MEASURING ACCURACY | Short range: accuracy ±1.0cm, standard deviation<0.3cm |
| Mid range: accuracy ±1.0cm, standard deviation<1.5cm | |
| Long range: accuracy ±1.5cm, standard deviation<0.5cm@0.01~3m, standard deviation<8cm@3~5m | |
| RESOLUTION | 1mm |
| WAVELENGTH | 940nm (Class1 standard compliant) |
| FIELD OF VIEW (FOV) | 15°~27° (adjustable) |
| COMMUNICATION INTERFACE | UART: both of the two ports can be used as UART simultaneously, 3.3V TTL signal level |
| CAN: both of the two ports can be used as CAN simultaneously | |
| BAUDRATE | UART: 115200~3000000bps (115200bps by default) |
| CAN: 100000~3000000bps (100000bps by default) | |
| CASCADE SUPPORT | UART: supports up to 8x cascades |
| CAN: supports up to 7x cascades | |
| POWER SUPPLY | 3.7~5.2V |
| POWER CONSUMPTION | 290mW (UART active output, long-range mode, 5.0V power supply, 58mA current) |
| WEIGHT | 2.7g |
| DIMENSIONS (L × W × H) |
35.58 × 12 × 8.05mm |
.jpg?1597257737844)
.jpg?1597257778813)
Bus de communication configurable, fournissant deux ports (connexion électrique identique) pour la télémétrie en cascade
SORTIE ACTIVE / SORTIE DE RECHERCHE
Mode de sortie de données configurable, le rendre plus flexible pour acquérir des données
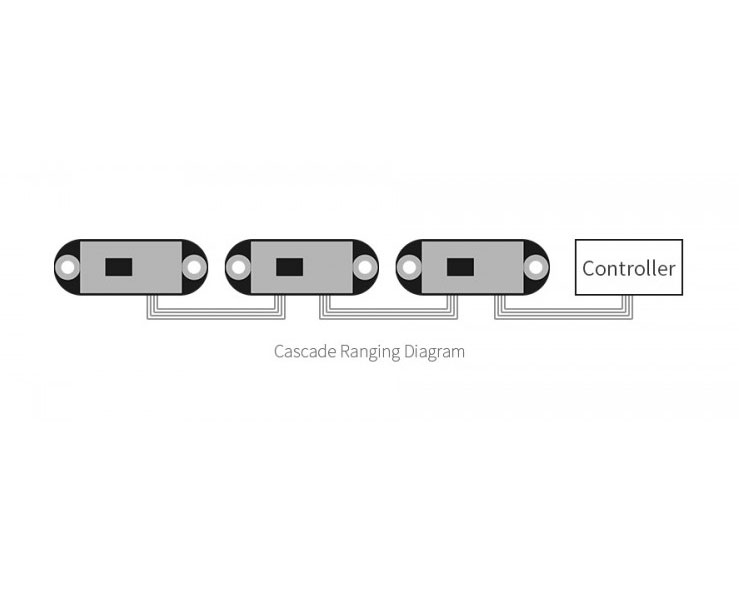
Prise en charge de la télémétrie en cascade
Plusieurs capteurs peuvent être connectés en série grâce à deux ports identiques embarqués, et chaque capteur peut être configuré avec un ID,
par conséquent, les données de télémétrie de tous les capteurs peuvent être acquises via un seul bus de communication.
Lors de l'utilisation de la télémétrie en cascade, trois modes de sortie sont disponibles: requête UART, requête CAN et sortie active CAN
Jusqu'à 8x cascades sur bus UART, jusqu'à 7x cascades sur bus CAN
.jpg?1597257833900)
Fournit un logiciel d'assistant d'ordinateur hôte, offrant des fonctions comprenant la configuration du capteur, le moniteur de forme d'onde, l'analyse de données, l'exportation et la relecture d'enregistrements de données, la mise à niveau du micrologiciel, etc.
.jpg?1597258050207)
Applications
.jpg?1597258097024)
Connexion avec Raspberry Pi
.jpg?1597258145850)
Connexion avec Arduino
.jpg?1597258221189)
Dimensions du contour
.jpg?1597258266871)
Ressources et services
.jpg?1597258299212)
Wiki: TOF_Laser_Range_Sensor


