

SEN0001 URM37 V4.0 Capteur à ultrasons
Capteur à ultrasons V4.0 URM37 est livré avec une compensation de température qui fournit une meilleure précision de mesure de distance. Il est caractéristique très unique dans l'industrie. URM37 V4.0 offre des modes de sortie: sortie analogique, commutateur, série (niveau TTL et RS232 en option) et PWM. Avec le mode analogique, la tension de sortie du capteur, qui est proportionnelle à la distance, il peut être relié à Arduino Pi framboise et LattePanda.
Avec le mode de commutation, la volonté de sortie d'un capteur marche / arrêt signal lorsque l'objet est détecté dans certaine distance (-défini par l'utilisateur). Avec le mode série, la valeur de distance acutal (cm) est calculée et sortie par l'intermédiaire TTL / RS232. Avec le mode PWM, le capteur ouptput signal PWM de date brute.
URM37 V4.0, la version actuelle a de meilleures capacités de renseignement, quant à lui, les dimensions mécaniques et des commandes d'interface et de communication broches sont compatibles avec V3.2, V3.2 a été inversé sur la base des modifications suivantes:
Niveau de série sélectionné parmi les points sautés à la touche, l'utilisateur peut facilement sélectionner RS232 ou le niveau de sortie niveau TTL sortie en appuyant sur les paramètres (après le redémarrage)
Modifié l'algorithme, zone si mort a été réduite et améliorer la précision
sortie de tension analogique, la tension et la distance mesurée est proportionnelle
support large de tension + 3.3V-5.0V
protection puissance inverse
Mesure automatique de l'intervalle de temps peut être modifié
Modifier un angle contrôlé servo de 0-180, compatible avec la plupart des servos du marché
Taux de rafraîchissement est maintenant fixé à 10hz.
SPÉCIFICATION
Puissance: + 3.3V ~ + 5.0V
Courant: <20mA
Température de fonctionnement: -10 ~ +70 C
Plage de détection: 5cm-500cm (2-196 in)
Résolution: 1cm (O.39 in)
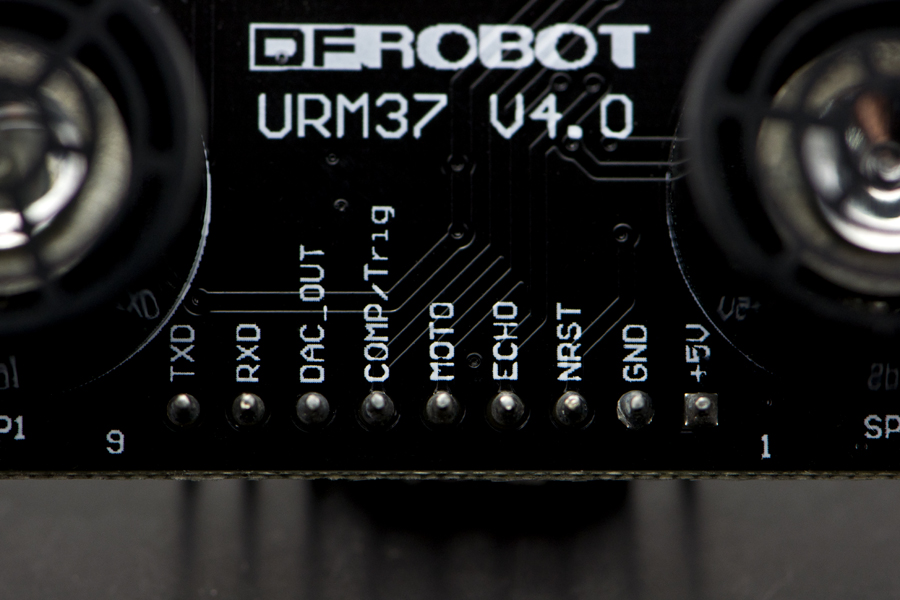
Interface: RS232 (TTL), PWM, Switch, Analog
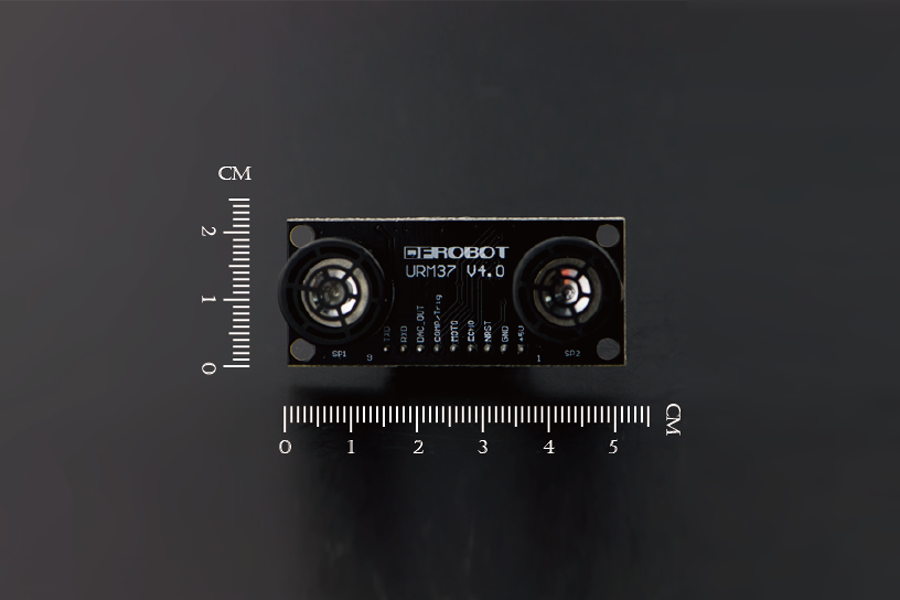
Taille: 22mm (0,87) x 51 mm (2 po)
Poids: 25g
PIECES EN OPTION
Capteur URM Support de fixation (FIT0006)
Étui pour URM37 avec Interface Servo (par MM-CNC)
DOCUMENTS


