

AltIMU-10 v6 Gyro, accéléromètre, boussole et altimètre (LSM6DSO, LIS3MDL et LPS22DF Socle).
L'AltIMU-10 v6 est une unité de mesure inertielle (IMU) et un altimètre qui comprend le même gyroscope et accéléromètre LSM6DSO et le même magnétomètre LIS3MDL que le MinIMU-9 v6, auxquels s'ajoute un baromètre numérique LPS22DF. Une interface I²C permet d'accéder à dix mesures indépendantes de pression, de rotation, d'accélération et de magnétisme qui peuvent être utilisées pour calculer l'altitude et l'orientation absolue du capteur. La carte fonctionne entre 2,5 et 5,5 V et a un espacement de 0,1″ entre les broches.
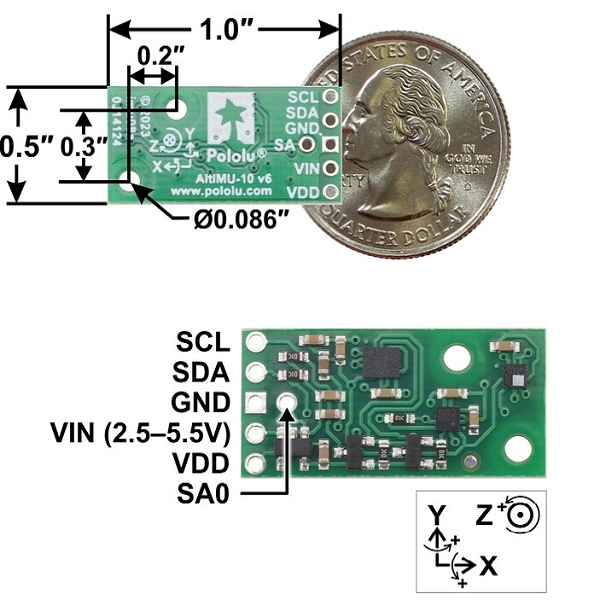
La carte Pololu AltIMU-10 v6 est une carte compacte (1.0″ × 0. 5″) qui combine le gyroscope et l'accéléromètre à 3 axes LSM6DSO, le magnétomètre à 3 axes LIS3MDL et le baromètre numérique LPS22DF de ST pour former une unité de mesure inertielle (IMU) et un altimètre ; nous recommandons donc de lire attentivement la fiche technique du LSM6DSO (pdf de 3MB), la fiche technique du LIS3MDL (pdf de 2MB) et la fiche technique du LPS22DF (pdf de 1MB) avant d'utiliser ce produit. Ces capteurs sont d'excellents circuits intégrés, mais leurs petits boîtiers les rendent difficiles à utiliser pour l'étudiant ou l'amateur typique. Ils fonctionnent également à des tensions inférieures à 3,6 V, ce qui peut compliquer l'interfaçage avec les microcontrôleurs fonctionnant à 5 V. L'AltIMU-10 répond à ces problèmes en incorporant des composants électroniques supplémentaires, notamment un régulateur de tension et un circuit de changement de niveau, tout en conservant une taille globale aussi compacte que possible. La carte est livrée entièrement peuplée de ses composants SMD, y compris le LSM6DSO, le LIS3MDL et le LPS22DF, comme le montre la photo du produit.
Par rapport à l'AltIMU-9 v5, la version v6 remplace l'accéléromètre/gyro MEMS LSM6DS33 par le nouveau LSM6DSO, qui offre diverses améliorations telles qu'un bruit plus faible et un débit de données de sortie maximal plus élevé pour le gyroscope. Il remplace également le capteur de pression LPS25HB par le LPS22DF, qui offre une meilleure précision et un bruit réduit en sortie, ainsi qu'un taux de sortie maximal beaucoup plus élevé. L'AltIMU-9 v6 est compatible avec l'AltIMU-9 v5 et devrait pouvoir le remplacer moyennant quelques modifications logicielles.
L'AltIMU-10 v6 est également compatible avec le MinIMU-9 v6 et offre les mêmes fonctionnalités, augmentées d'un baromètre numérique qui peut être utilisé pour obtenir des mesures de pression et d'altitude. Il comprend un deuxième trou de montage et n'est que 0,2″ plus long que le MinIMU-9. Tout code écrit pour la MinIMU-9 v6 devrait également fonctionner avec la AltIMU-10 v6.
Les capteurs LSM6DSO, LIS3MDL et LPS22DF possèdent de nombreuses options configurables, notamment des sensibilités sélectionnables dynamiquement pour le gyroscope, l'accéléromètre et le magnétomètre, ainsi que des résolutions sélectionnables pour le baromètre. Chaque capteur dispose également d'un choix de débits de données de sortie. Les trois circuits intégrés sont accessibles via une interface I²C/TWI partagée, ce qui permet d'adresser les capteurs individuellement via une seule ligne d'horloge et une seule ligne de données. En outre, une broche de configuration d'adresse esclave permet aux utilisateurs de modifier les adresses I²C des capteurs et d'avoir deux unités AltIMU connectées sur le même bus I²C. (Pour plus d'informations, voir la section Communication I²C ci-dessous.

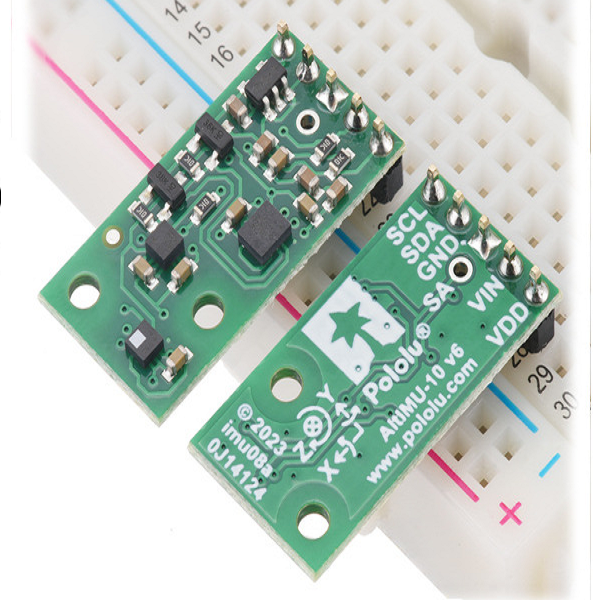
La carte porteuse comprend un régulateur de tension linéaire à faible chute qui fournit les 3,3 V requis par le LSM6DSO, le LIS3MDL et le LPS22DF, ce qui permet d'alimenter le module à partir d'une seule alimentation de 2,5 V à 5,5 V. La sortie du régulateur est disponible sur la broche VDD et peut fournir près de 150 mA à des dispositifs externes. La sortie du régulateur est disponible sur la broche VDD et peut fournir près de 150 mA à des dispositifs externes. La carte comprend également un circuit qui décale l'horloge I²C et les lignes de données au même niveau de tension logique que le VIN fourni, ce qui facilite l'interfaçage de la carte avec les systèmes 5 V. L'espacement des broches de la carte de 0,1″ la rend facile à utiliser avec les cartes à pain sans soudure standard et les cartes perforées de 0,1″.
Caractéristiques techniques
Dimensions : 1.0″ × 0.5″ × 0.1″ (25 mm × 13 mm × 3 mm)
Poids sans les broches d'en-tête : 0,8 g (0,03 oz)
Tension de fonctionnement : 2,5 V à 5,5 V
Courant d'alimentation : 5 mA
Format de sortie (I²C) :
Gyroscope : une lecture de 16 bits par axe
Accéléromètre : une lecture de 16 bits par axe
Magnétomètre : une lecture de 16 bits par axe
Baromètre : lecture de la pression sur 24 bits (4096 LSb/mbar)
Plage de sensibilité :
Gyroscope : ±125, ±250, ±500, ±1000 ou ±2000°/s
Accéléromètre : ±2, ±4, ±8 ou ±16 g
Magnétomètre : ±4, ±8, ±12 ou ±16 gauss
Baromètre : 260 mbar à 1260 mbar (26 kPa à 126 kPa)
Les neuf mesures indépendantes de rotation, d'accélération et de magnétisme fournissent toutes les données nécessaires à la création d'un système de référence d'attitude et de cap (AHRS), et les mesures du capteur de pression absolue peuvent être facilement converties en altitudes, ce qui donne un total de dix mesures indépendantes (parfois appelées 10DOF). Avec un algorithme approprié, un microcontrôleur ou un ordinateur peut utiliser les données pour calculer l'orientation et la hauteur de la carte AltIMU. Le gyroscope peut être utilisé pour suivre très précisément la rotation sur une courte échelle de temps, tandis que l'accéléromètre et la boussole peuvent aider à compenser la dérive du gyroscope dans le temps en fournissant un cadre de référence absolu. Les axes respectifs des deux puces sont alignés sur la carte pour faciliter les calculs de fusion des capteurs. (Pour un exemple d'un tel système utilisant un Arduino, voir l'image ci-dessous et la section Exemple de code au bas de cette page).
Composants inclus
Une bande de 1×6 broches d'en-tête de 0,1″ et une bande de 1×5 broches d'en-tête à angle droit de 0,1″ sont incluses, comme le montre l'image ci-dessous. Vous pouvez souder la bande d'en-tête de votre choix à la carte pour l'utiliser avec des câbles personnalisés ou des planches à pain sans soudure, ou souder des fils directement à la carte elle-même pour des installations plus compactes. La carte comporte deux trous de montage qui fonctionnent avec des vis #2 ou M2 (non incluses).
Utilisation de l'AltIMU-10 v6
Connexions
Un minimum de quatre connexions est nécessaire pour utiliser l'AltIMU-10 : VIN, GND, SCL, et SDA. VIN doit être connecté à une source de 2,5 V à 5,5 V, GND à 0 volt, et SCL et SDA doivent être connectés à un bus I²C fonctionnant au même niveau logique que VIN. (Alternativement, si vous utilisez la carte avec un système de 3,3 V, vous pouvez laisser VIN déconnecté et contourner le régulateur intégré en connectant 3,3 V directement à VDD).

Désignation de broches
|
SCL |
Ligne d'horloge I²C décalée : HIGH est VIN, LOW est 0 V |
|
SDA |
Ligne de données I²C à niveau décalé : HIGH est VIN, LOW est 0 V |
|
GND |
La connexion de masse (0 V) pour votre alimentation. Votre source de contrôle I²C doit également partager une masse commune avec cette carte. |
|
VIN |
Il s'agit de la principale connexion d'alimentation de 2,5 V à 5,5 V. Les décalages de niveau SCL et SDA tirent les bits du bus I²C jusqu'à ce niveau. |
|
VDD |
Sortie régulateur 3,3 V ou alimentation logique basse tension, en fonction de VIN. Lorsque VIN est alimenté et supérieur à 3,3 V, VDD est une sortie régulée de 3,3 V qui peut fournir jusqu'à environ 150 mA aux composants externes. Par ailleurs, lors de l'interfaçage avec un système de 2,5 V à 3,3 V, VIN peut être déconnecté et l'alimentation peut être fournie directement à VDD. Ne jamais fournir de tension à VDD lorsque VIN est connecté, et ne jamais fournir plus de 3,6 V à VDD. |
|
SA0 |
Entrée de niveau logique 3,3 V pour déterminer les adresses esclaves I²C des trois circuits intégrés (voir ci-dessous). Elle est tirée vers le haut par défaut au moyen d'une résistance de 10 kΩ. Cette broche n'est pas décalée en niveau et n'est pas tolérante au 5V. |
The CS, data ready, and interrupt pins of the LSM6DO, LIS3MDL, and LPS22DF are not accessible on the AltIMU-10 v6. In particular, the absence of the CS pin means that the optional SPI interface of these ICs is not available. If you want these features, consider using our LSM6DSO carrier, LIS3MDL carrier, and LPS22DF carrier boards.
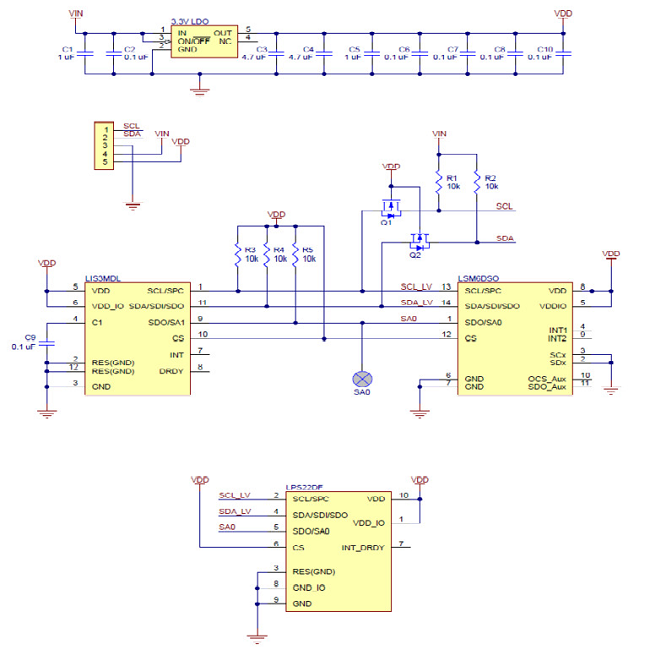
Le schéma ci-dessus montre les composants supplémentaires que la carte porteuse incorpore pour faciliter l'utilisation des LSM6DSO, LIS3MDL et LPS22DF, notamment le régulateur de tension qui permet d'alimenter la carte à partir d'une seule alimentation de 2,5 V à 5,5 V et le circuit de décalage de niveau qui permet la communication I²C au même niveau de tension logique que VIN. Ce schéma est également disponible sous forme de pdf téléchargeable: AltIMU-10 v6 schematic (107k pdf).
I²C Communication
Le gyroscope et l'accéléromètre du LSM6DSO, le magnétomètre du LIS3MDL et le baromètre du LPS22DF peuvent être interrogés et configurés via le bus I²C. Chacun des quatre capteurs agit comme un dispositif esclave sur le même bus I²C (c'est-à-dire que leurs lignes d'horloge et de données sont liées pour faciliter la communication). En outre, des décalages de niveau sur les lignes d'horloge I²C (SCL) et de données (SDA) permettent la communication I²C avec des microcontrôleurs fonctionnant à la même tension que le VIN (2,5 V à 5,5 V). Une explication détaillée des protocoles utilisés par chaque dispositif est disponible dans la fiche technique du LSM6DSO datasheet (3MB pdf), le LIS3MDL datasheet (2MB pdf), et le LPS22DF datasheet (1MB pdf). Des informations plus détaillées sur l'I²C en général sont disponibles dans la NXP’s I²C-bus specification (1MB pdf).
Le LSM6DSO, le LIS3MDL et le LPS22DF ont chacun des adresses esclaves distinctes sur le bus I²C. La carte connecte les broches de sélection d'adresse esclave (SA0 ou SA1) des trois circuits intégrés et les relie toutes à VDD par une résistance de 10 kΩ. Vous pouvez mettre la broche SA0 à l'état bas pour changer l'adresse de l'esclave. Cela vous permet d'avoir deux AltIMU (ou un AltIMU v6 et un MinIMU v6) connectés sur le même bus I²C. Le tableau suivant indique les adresses esclaves des capteurs : LSM6DSO datasheet (3MB pdf), LIS3MDL datasheet (2MB pdf), LPS22DF datasheet (1MB pdf). Des informations plus détaillées sur l'I²C en général sont disponibles dans la NXP’s I²C-bus specification (1MB pdf).
|
Capteur |
Adresse Esclave(défaut) |
Adresse Esclave (SA0 alimenté low) |
|
LSM6DSO (gyro and accéleromètre) |
1101011b |
1101010b |
|
LIS3MDL (magnétomètre) |
0011110b |
0011100b |
|
LPS22DF (baromètre) |
1011101b |
1011100b |
Les trois puces de l'AltIMU-10 v6 sont conformes aux normes I²C en mode rapide (400 kHz) et en mode normal.
Exemple de code
Nous avons écrit une bibliothèque LSM6 Arduino library, une bibliothèque LIS3MDL Arduino library et une bibliothèque LIS3MDL Arduino library qui facilitent l'interface de l'AltIMU-10 v6 avec une carte compatible Arduino telle qu'une A-Star. Elles facilitent également la configuration des capteurs et la lecture des données brutes du gyroscope, de l'accéléromètre, du magnétomètre et de la pression.
Pour une démonstration de ce que vous pouvez faire avec ces données, vous pouvez transformer un Arduino connecté à un AltIMU-10 v6 en un système de référence d'attitude et de cap, ou AHRS, avec ce programme this Arduino program. Il utilise les données de l'AltIMU-10 v6 pour calculer les angles de roulis, de tangage et de lacet estimés, et vous pouvez visualiser la sortie de l'AHRS avec un programme de test 3D sur votre PC (comme le montre la capture d'écran ci-dessus). Ce logiciel est basé sur les travaux de Jordi Munoz, William Premerlani, Jose Julio et Doug Weibel.. Il utilise les données de l'AltIMU-10 v6 pour calculer les angles de roulis, de tangage et de lacet estimés, et vous pouvez visualiser la sortie de l'AHRS avec un programme de test 3D sur votre PC (comme le montre la capture d'écran ci-dessus). Ce logiciel est basé sur les travaux de Jordi Munoz, William Premerlani, Jose Julio et Doug Weibel.. Il utilise les données de l'AltIMU-10 v6 pour calculer les angles de roulis, de tangage et de lacet estimés, et vous pouvez visualiser la sortie de l'AHRS avec un programme de test 3D sur votre PC (comme le montre la capture d'écran ci-dessus). Ce logiciel est basé sur les travaux de Jordi Munoz, William Premerlani, Jose Julio et Doug Weibel.
Suggestions pour le protocole
Le gyroscope, l'accéléromètre, le magnétomètre et le capteur de pression sont tous en mode veille par défaut. Vous devez les activer en réglant les registres de configuration appropriés.
Vous pouvez lire ou écrire plusieurs registres dans le LIS3MDL avec une seule commande I²C en affirmant le bit le plus significatif de l'adresse du registre pour activer l'auto-incrémentation de l'adresse.
L'adresse du registre dans le LSM6DSO et le LPS22DF s'incrémente automatiquement lors d'un accès à plusieurs octets, ce qui permet de lire ou d'écrire plusieurs registres en une seule commande I²C. Contrairement au fonctionnement de certains autres capteurs ST, l'auto-incrémentation est activée par défaut ; vous pouvez la désactiver pour chaque puce à l'aide d'un registre de configuration.
En plus des fiches techniques, ST fournit des notes d'application pour le LSM6DSO Application Notes (2MB pdf), LIS3MDL Application Notes (598k pdf), et LPS22DF Application Notes (519k pdf) contenant des informations supplémentaires et des conseils d'utilisation.
Comparaison des produits
Nous proposons plusieurs capteurs de mesure inertielle et d'orientation. Le tableau ci-dessous compare leurs capacités :



