
Platine de Déploiement d'Orientation Absolue 9 DOF Fusion BNO055
Si vous avez déjà commandé et câblé un capteur de 9 DOF, vous avez probablement compris le défi de transformer les données du capteur d'un accéléromètre, d'un gyroscope et d'un magnétomètre en une "orientation de l'espace 3D" réelle! L'orientation est un problème difficile à résoudre. Les algorithmes de fusion de capteurs (la sauce secrète qui associe les données de l'accéléromètre, du magnétomètre et du gyroscope à une orientation stable à trois axes) peuvent être incroyablement difficiles à comprendre et à mettre en œuvre sur des systèmes temps réel peu coûteux.
Bosch est la première entreprise à réussir dans ce domaine en prenant un accéléromètre, un magnétomètre et un gyroscope MEMS et en les plaçant sur une seule puce avec un processeur ARM Cortex-M0 à haute vitesse pour digérer toutes les données du capteur, résumer la fusion du capteur et les exigences en temps réel et cracher des données que vous pouvez utiliser dans des quaternions, des angles d’Euler ou des vecteurs.
Plutôt que de passer des semaines ou des mois à manipuler des algorithmes de précision et de complexité variables, vous pouvez obtenir des données de capteur significatives en quelques minutes grâce au BNO055 - un capteur intelligent à 9 DOF qui fusionne tout seul le capteur! Vous pouvez lire les données directement sur I2C et votre oncle de Bob.
Le BNO055 peut émettre les données de capteur suivantes:
- Orientation absolue (vecteur d'Euler, 100Hz) Données d'orientation à trois axes basées sur une sphère de 360°
- Orientation absolue (Quatenrion, 100Hz) Sortie quaternion à quatre points pour une manipulation plus précise des données
- Vecteur de vitesse angulaire (100Hz) Trois axes de la «vitesse de rotation» en rad / s
- Vecteur d'accélération (100Hz) Trois axes d'accélération (gravité + mouvement linéaire) en m / s ^ 2
- Vecteur de force de champ magnétique (20Hz) Détection de champ magnétique sur trois axes en micro-Tesla (uT)
- Vecteur d'accélération linéaire (100Hz) Données d'accélération linéaire sur trois axes (accélération moins gravité) en m / s ^ 2
- Vecteur de gravité (100Hz) Trois axes d’accélération gravitationnelle (moins tout mouvement) en m / s ^ 2
- Température (1Hz) Température ambiante en degrés Celsius
Pratique, non? Nous avons donc placé ce très joli capteur sur son propre circuit, complet avec un régulateur de 3,3 V, un décalage de niveau logique pour les broches Reset et I2C, un cristal externe de 32,768 KHz (recommandé pour de meilleures performances) et des éruptions pour d'autres broches qui pourraient vous être utiles. . Livré assemblé et testé, avec un petit morceau de tête. Il faut un peu de soudure pour fixer l’en-tête à la carte de circuit imprimé épanouie, mais son travail est relativement facile. Mieux encore, vous pouvez commencer en 10 minutes avec notre tutoriel pratique sur l'assemblage, le câblage, les bibliothèques CircuitPython & Arduino, l'interface graphique Processing, et plus encore!
Détails techniques
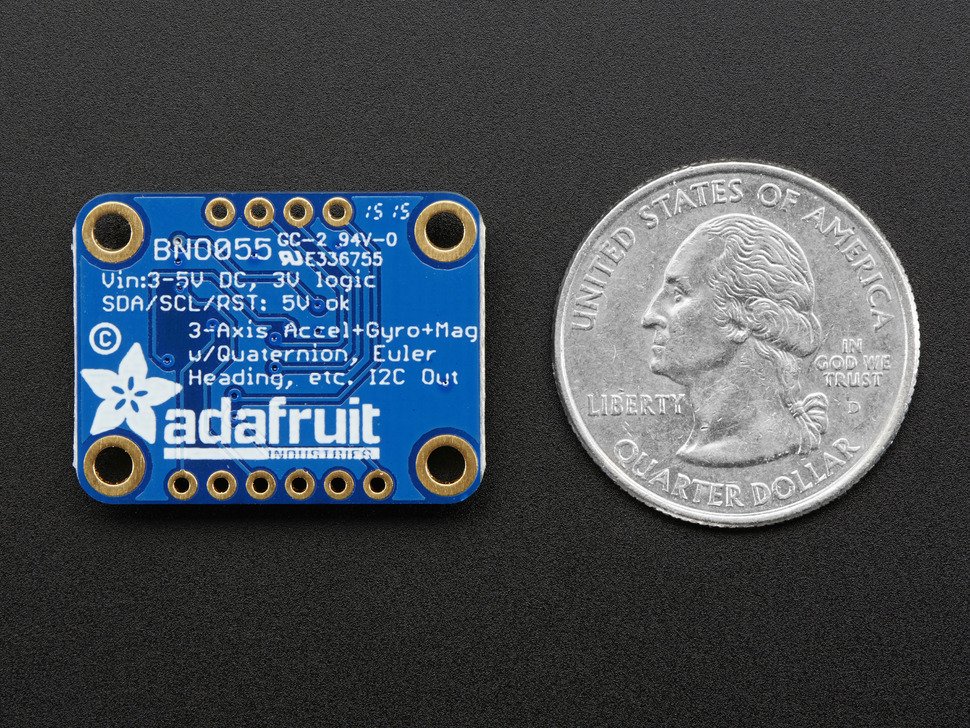
- Dimensions: 20 mm x 27 mm x 4 mm / 0.8 "x 1.1" x 0.2"
- Les trous de la tête commencent à 4 mm des trous de montage
- Dimensions du trou de montage: 20 mm x 12 mm
- Utilise l'adresse I2C 0x28 (par défaut) ou 0x29
- Poids: 3g
- Fiche technique, fichiers EagleCAD PCB et Fritzing disponibles dans le didacticiel du produit


