
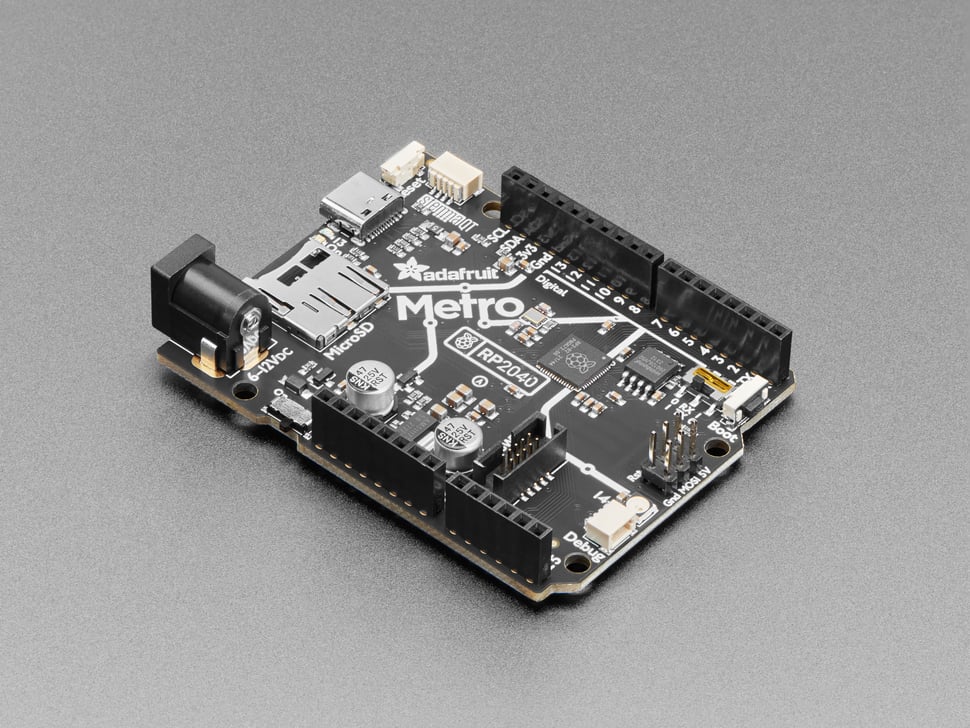
Adafruit Metro RP2040 complète la puce Raspberry Pi RP2040 pour en faire une excellente carte de développement pour les projets qui veulent une compatibilité de forme Arduino ou qui ont juste besoin d'espace supplémentaire et de ports de débogage.
- Puce principale RP2040, horloge 133 MHz, logique 3,3 V
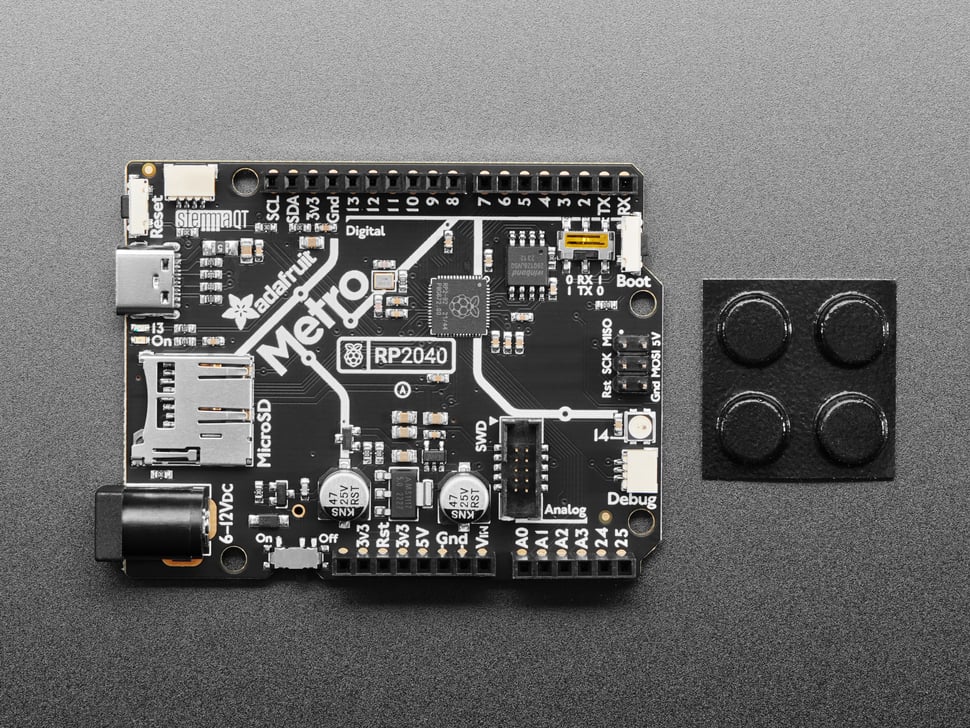
- 16 Mo de mémoire flash QSPI pour le stockage du programme
- 24 GPIO, dont 4 sont également des entrées analogiques
- La carte Micro SD câblée pour l'interfaçage SPI, a également des broches supplémentaires connectées pour l'interfaçage SDIO utilisateur avancé (notez qu'il n'y a pas de code d'utilisation publié pour SDIO dans Arduino/Python, il s'agit donc d'une configuration à la pointe de la technologie) < /li>
- NéoPixel RVB intégré
- LED n° 13 intégrée
- Port Stemma QT pour périphériques et capteurs I2C
- Boutons de réinitialisation et de démarrage sur le bord du PCB
- Port de débogage Pico Probe - compatible JST SH à 3 broches
- Port de débogage SWD - connecteur standard 2x5 0,05"
- Alimentation et données USB de type C
- Prise CC 5,5 mm/2,1 mm pour alimentation 6-12 VCC
- Interrupteur marche/arrêt pour prise CC
- Les numéros de broches GPIO correspondent aux broches Arduino classiques, autres que A4/A5 qui sont D24 et D25 (il n'y a que 4 broches ADC sur le RP2040)
- Commutateur RX/TX pour permuter les emplacements D0 et D1
Vous vous posez peut-être des questions sur le commutateur RX-TX : nous l'avons ajouté car la carte Arduino traditionnelle commence à compter le GPIO pour les broches numériques avec 0-7, puis 8-13. Cependant, les broches D0/D1 sont aussi traditionnellement le matériel UART Serial1, où D0 est Rx et D1 est Tx. Sur le RP2040, cependant, les broches UART sont inversées : D0 est Tx et D1 est Rx. Ainsi, un commutateur DPDT : basculez dans un sens pour que le GPIO aille dans l'ordre de 0 à 7, basculez dans l'autre sens pour que les emplacements logiques de l'UART matériel soient corrects, mais maintenant l'ordre des broches est 1, 0, 2, 3..7 . Bien sûr, c'est aussi pratique si, comme nous, vous échangez souvent les broches - maintenant vous n'avez plus besoin d'exiger ou de couper/souder des traces !
À propos du RP2040
Le RP2040 est une puce puissante, qui a la vitesse d'horloge de notre M4 (SAMD51) et deux cœurs équivalents à notre M0 (SAMD21). Puisqu'il s'agit d'une puce M0, elle n'a pas d'unité à virgule flottante ou de support matériel DSP - donc si vous faites quelque chose avec des calculs à virgule flottante lourds, cela se fera dans le logiciel et donc pas aussi rapidement qu'un M4. Pour de nombreuses autres tâches de calcul, vous obtiendrez des vitesses proches de M4 !
Pour les périphériques, il y a deux contrôleurs I2C, deux contrôleurs SPI et deux UART qui sont multiplexés sur le GPIO - vérifiez le brochage pour savoir quelles broches peuvent être réglées sur lesquelles. Il y a 16 canaux PWM, chaque broche a un canal sur lequel elle peut être réglée (idem pour le brochage).
Vous remarquerez qu'il n'y a pas de périphérique I2S, ni de SDIO, ni de caméra, qu'est-ce qui se passe ? Eh bien, au lieu d'avoir un support matériel spécifique pour les périphériques de type données série comme ceux-ci, le RP2040 est livré avec le système de machine d'état PIO, qui est un moyen unique et puissant de créer une logique matérielle personnalisée et des blocs de traitement de données qui s'exécutent seuls sans prenant un processeur. Par exemple, NeoPixels - nous bitbangons souvent le protocole spécifique à la synchronisation pour ces LED. Pour le RP2040, nous utilisons à la place un objet PIO qui lit dans le tampon de données et synchronise le bon flux binaire avec une précision parfaite. Idem avec entrée ou sortie audio I2S, écrans à matrice LED, 8 bits ou TFT basés sur SPI, même VGA ! Dans MicroPython et CircuitPython, vous pouvez créer des commandes de contrôle PIO pour créer un script pour le périphérique et le charger au moment de l'exécution. Il y a 2 périphériques PIO avec 4 machines d'état chacun.
C'est génial Prise en charge de C/C++, support Arduino non officiel (mais vraiment bon)< /span>, un officiel port MicroPython, et un Port CircuitPython ! Nous, bien sûr, recommander CircuitPython car nous pensons que c'est le moyen le plus simple de démarrer , et il prend en charge la plupart de nos pilotes, écrans, capteurs, etc., pris en charge dès le départ afin que vous puissiez suivre nos projets et didacticiels CircuitPython.
Bien que le RP2040 ait beaucoup de RAM intégrée (264 Ko), il n'a pas de mémoire FLASH intégrée. Au lieu de cela, cela est fourni par la puce flash QSPI externe. Sur cette carte, il y a 16 Mo, qui sont partagés entre le programme qu'il exécute et tout stockage de fichiers utilisé par MicroPython ou CircuitPython. Lorsque vous utilisez C/C++, vous obtenez toute la mémoire flash, si vous utilisez Python, il vous restera environ 7 Mo pour le code, les fichiers, les images, les polices, etc.
Caractéristiques de la puce RP2040 :
- Double ARM Cortex-M0+ à 133 MHz
- SRAM sur puce de 264 Ko dans six banques indépendantes
- Prise en charge jusqu'à 16 Mo de mémoire flash hors puce via un bus QSPI dédié
- Contrôleur DMA
- Barre transversale AHB entièrement connectée
- Périphériques interpolateurs et diviseurs entiers
- LDO programmable sur puce pour générer une tension centrale
- 2 PLL sur puce pour générer des horloges USB et centrales
- 30 broches GPIO, dont 4 peuvent être utilisées comme entrées analogiques
- Périphériques
2 UART
2 contrôleurs SPI
2 contrôleurs I2C
16 canaux PWM
Contrôleur USB 1.1 et PHY, avec prise en charge de l'hôte et de l'appareil
8 machines d'état PIO


