
The LC29H series can track L1+L5 dual-frequency and multi-GNSS signals, reducing multipath effects in urban canyons and improving positioning accuracy while maintaining low power consumption.
General features of the LC29H series include:
- Standard Raspberry Pi 40PIN GPIO extension header, supports Raspberry Pi series boards, Jetson Nano.
- Supports simultaneous tracking of L1+L5 dual-band satellite signals, reducing multipath effects in urban canyons and improving positioning accuracy.
- Supports concurrent receiving of multi-GNSS systems (GPS, BDS, GLONASS, Galileo and QZSS) while maintaining low power consumption.
- Built-in low noise amplifier and acoustic surface filter to realize -165dBm high sensitivity and enhance anti-interference performance.
- Supports multi-frequency active interference cancellation, effectively suppressing or eliminating narrowband signal (WiFi/2/3/4/5G) interference to ensure navigation accuracy.
- A-GNSS (Assisted GNSS) support, reducing the time to first fix (TTFF) with cold start when powered on to 5 seconds.
- Support QGNSS software, easy to set various module functions.
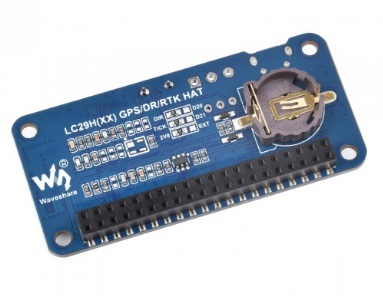
- Onboard battery holder, supports ML1220 rechargeable cell, for preserving ephemeris information and hot starts.
LC29H(DA) GPS/RTK HAT version supports the following features:
- Supports fast convergence dual-band RTK centimeter-level positioning, suitable for high-precision positioning of terminal devices.

Specifications:
- Frequency Band: GPS/QZSS: L1C/A, L5. BDS: B1I, B2a. Galileo: E1, E5a. GLONASS: L1.
- Number of Concurrent GNSS: GPS/QZSS+BDS+Galileo+GLONASS.
- RTK Function: RTK Rover.
- Positioning Accuracy: PVT - 1m CEP, RTK - 0.01m + 1ppm CEP.
- Navigation Update Rate: PVT - 1~10Hz, RTK - 1Hz, RAW - 1Hz.
- RTK Convergence Time: <10s
- Time to First Fix (AGNSS Off): Cold Starts - 26s, Hot Starts - 1s, Aided Starts - 16s.
- Time to First Fix (AGNSS On): Cold Starts - 5s, Hot Starts - 5s, Aided Starts - 5s.
- Sensitivity: -165dBm in Tracking and Navigating, -159dBm in Re-Aquisition, -147dBm in Cold Starts.
- Dynamic Performance: 4g Acceleration (Max), 10000m Altitude (Max), 500m/s Velocity (Max).
- Communication Interface: UART (9600~ 3000000bps, 115200bps by default), I2C (Max 400KHz).
- Protocol: NMEA 0183 V4.10, RTCM 3.x.
- Power Supply: 5V.
- Overall Current: <40mA@5V (Continue Mode).
- Operating Temperature: -40~85℃
- Dimensions: 65x30.5mm
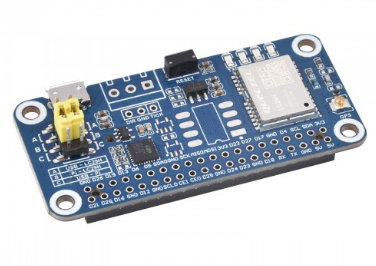
Board Definition:

- LC29H module
- RT9166A-28PXL: 5V to 2.8V LDO chip
- CP2102N: USB to UART chip
- Raspberry Pi 40PIN GPIO header: for connecting with Raspberry Pi
- UART selection jumper:
A - control the LC29H via USB to UART
B - control the LC29H via Raspberry Pi
C - access Raspberry Pi via USB to UART - IPEX 1 connector: LC29H module antenna connector
- Micro USB interface
- RT9193-33PB: 5V to 3.3V LDO chip
- RESET button: reset the LC29H module
- Status Indicators:
PWR - Power Indicator
RXD/TXD - UART transceiver indicator
PPS - GPS status indicator - NDC7002N: I2C voltage translator
- ML1220 Battery holder: supports ML1220 rechargeable cell, for preserving ephemeris information and hot start
Board Pinout:

Board Dimensions:



