


Le WAVE-17075 est un HAT conçu pour le Raspberry Pi qui vous permet de transférer des informations avec le protocole CAN FD et le protocole CAN 2.0 via 2 canaux. Avec ses différentes protections, vous pouvez compter sur un transfert de données sûr et fiable.
Le 2-CH CAN FD HAT est un HAT d'extension de bus CAN à 2 canaux conçu pour Raspberry Pi, prend en charge CAN FD (CAN avec débit de données flexible). Il activera le bus CAN pour votre Raspberry Pi, non seulement le protocole CAN 2.0 d'origine, mais également l'extension CAN FD, avec un débit de données plus élevé.
Grâce à plusieurs circuits de protection embarqués, y compris une surtension de 500 W, une protection ESD, une protection contre les courts-circuits et une isolation électrique, il rend la communication plus sûre et plus fiable.
Caractéristiques
- En-tête d'extension GPIO standard Raspberry Pi 40PIN, prend en charge les cartes de la série Raspberry Pi, Jetson Nano
- Prend en charge les protocoles traditionnels CAN2.0 et CAN FD
- Broches de contrôle SPI de dérivation, pour la connexion avec des cartes de contrôle hôtes telles que STM32/Arduino
- Isolation électrique embarquée, tension isolée jusqu'à 5KV, fonctionnement stable, capacité anti-interférence plus élevée
- Protection contre la foudre à bord, protection ESD, protection contre les courts-circuits, communication plus sûre
- Traducteur de tension embarqué, sélectionnez la tension de fonctionnement 3,3 V/5 V par cavalier
- Résistance terminale 120Ω intégrée, configurée par cavalier
- Livré avec des ressources de développement et un manuel (exemples pour Raspberry Pi/Arduino)
Spécifications
- Contrôleur CAN : MCP2518FD
- Émetteur-récepteur CAN : MCP2562FD
- Interface de communication : SPI (deux canaux SPI indépendants par défaut, passage à un canal SPI par soudure)
- Alimentation : borne d'entrée d'alimentation externe, ou Raspberry Pi
- Tension de borne d'entrée d'alimentation: DC 8 ~ 26V
- Tension de fonctionnement : 5V
- Niveau logique : 3,3 V/5 V
- Dimensions : 65,0 x 56,5 mm
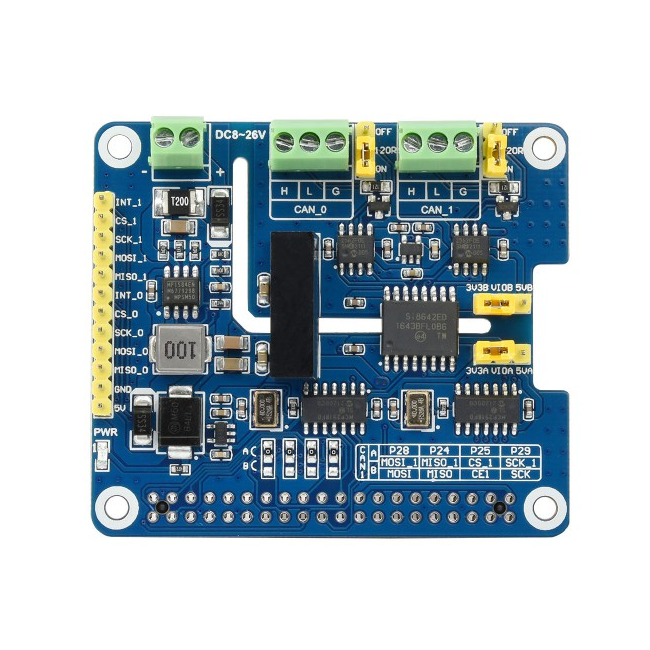
Brochage

Tableau et Dimensions


| 1 | Contrôleur MCP2518FD | 11 | Interrupteur de résistance terminale 120Ω |
| 2 | Émetteur-récepteur MCP2562FD | 12 | Commutateur de niveau logique 3.3V/5V |
| 3 | Isolateur numérique SI8642ED | 13 | Sélection du mode de fonctionnement CAN A: CAN_0 et CAN_1 utilisent deux SPI séparés (par défaut) B: CAN_0 et CAN_1 partagent un seul SPI |
| 4 | Puce d'alimentation MP1584EN | 14 | Indicateur d'alimentation |
| 5 | Puce de puissance RT9193-33 | 15 | Fusible à réarmement rapide 2A |
| 6 | Module d'isolation d'alimentation B0505LS-1W | 16 | Diode anti-retour d'alimentation |
| 7 | En-tête GPIO standard Raspberry Pi 40PIN | 17 | Diode anti-retour de flux d'alimentation |
| 8 | Borne à vis bus CAN | 18 | Diode de roue libre |
| 9 | Borne d'alimentation externe 8~26V DC entrée |
19 | Diode TVS SM24CANB |
| 10 | Broches de contrôle MCU à utiliser avec des cartes hôtes comme Arduino |
Ressources
- Wiki du Product
- Schémas du produit
- Fiche technique du contrôleur CAN (MCP2518FD)
- Fiche technique de l'émetteur-récepteur CAN (MCP2562FD)
Liste d'expédition
Poids: 0,03 kg
- CHAPEAU 2 CANAUX CAN FD x1
- 2 × 20PIN femelle en-tête x1
- Pack d'entretoises (2pcs) x1


