





MAX-M8Q GNSS HAT pour Raspberry Pi, Prise en charge des récepteurs multi-constellations, GPS, Beidou, Galileo, GLONASS
Module GNSS basé sur MAX-M8Q pour Raspberry Pi
Positionnement précis et rapide avec dérive mineure, faible consommation d'énergie, capacité exceptionnelle d'anti-spoofing et d'anti-brouillage
.jpg?1595618781955)
Il s'agit d'un Raspberry Pi GNSS HAT basé sur MAX-M8Q avec prise en charge de récepteurs multi-constellations, ce qui signifie que jusqu'à 3 types de systèmes de satellites GNSS peuvent être utilisés ensemble, y compris GPS, Beidou, Galileo et GLONASS. Il prend également en charge les systèmes d'extension tels que SBAS, QZSS, IMES et D-GPS. Il dispose d'un positionnement précis et rapide avec une dérive mineure, une faible consommation d'énergie, une capacité exceptionnelle d'anti-usurpation et d'anti-brouillage, etc.
En l'attachant simplement au Pi, il est assez facile d'activer la capacité GNSS pour votre Raspberry Pi.
Caractéristiques en un coup d'œil
- Prise en charge du récepteur multi-constellations, réception simultanée de jusqu'à 3 types de systèmes de satellites GNSS de GPS, Beidou, Galileo et GLONASS, tout en conservant une faible consommation d'énergie
- Augmenter la prise en charge des systèmes, y compris SBAS, QZSS, IMES, D-GPS, améliorant les performances de positionnement de l'emplacement de service
- Prise en charge A-GNSS (GNSS assisté), réduisant le premier temps de positionnement lors de la mise sous tension, améliorant la sensibilité d'acquisition
- Caractéristiques -167dBm sensibilité de navigation et capacité exceptionnelle d'anti-usurpation et d'anti-brouillage, prend en charge la géo-clôture
- Prend en charge U-Center, un moyen simple de configurer le module
- En-tête d'extension GPIO Raspberry Pi 40PIN standard, prend en charge les cartes de la série Raspberry Pi, Jetson Nano
- Convertisseur USB vers UART CP2102 intégré pour le débogage série
- Décompose l'interface UART et I2C du module, pour la connexion avec des cartes hôtes comme Arduino / STM32
- Plage de débit en bauds: 4800 ~ 921600bps (9600bps par défaut)
- Prend en charge l'interface DDC (compatible I2C): jusqu'à 400 KHz (max)
- Support de batterie intégré, prend en charge la cellule rechargeable ML1220, pour préserver les informations sur les éphémérides et les démarrages à chaud
- 4x LED pour indiquer l'état de fonctionnement du module
- Livré avec des ressources de développement et un manuel (exemples pour Raspberry Pi / Jetson Nano / Arduino / STM32)
| GNSS SPECIFICATIONS | ||||||
|---|---|---|---|---|---|---|
| MAX-M8Q | GPS & GLONASS | GPS | GLONASS | BeiDou | Galileo | |
| Frequency band | 72x u-blox M8 engine channels GPS L1C/A, SBAS L1C/A, QZSS L1C/A, QZSS L1 SAIF, GLONASS L1OF, BeiDou B1I, Galileo E1B/C |
|||||
| Horizontal positioning accuracy | 2.5m CEP | 2.5m CEP | 4.0m CEP | 3.0m CEP | - | |
| Max navigation update rate | 10Hz | 18Hz | 18Hz | 18Hz | 18Hz | |
| Time-To-First-Fix | Cold starts | 26s | 29s | 30s | 34s | 45s |
| Hot starts | 1s | 1s | 1s | 1s | 1s | |
| Aided starts | 2s | 2s | 2s | 3s | 7s | |
| Sensitivity | Tracking and navigating | -167 dBm | -166 dBm | -166 dBm | -160 dBm | -159 dBm |
| Re-acquisition | -160 dBm | -160 dBm | -156 dBm | -157 dBm | -153 dBm | |
| Cold starts | -148 dBm | -148 dBm | -145 dBm | -143 dBm | -138 dBm | |
| Hot starts | -157 dBm | -157 dBm | -156 dBm | -155 dBm | -151 dBm | |
| PPS accuracy | RMS | 30ns | 30ns | 30ns | 30ns | 30ns |
| 99% | 60ns | 60ns | 60ns | 60ns | 60ns | |
| PPS frequency | 0.25Hz…10MHz (configurable) | |||||
| Velocity accuracy | 0.05m/s | |||||
| Heading accuracy | 0.3 degree | |||||
| Operational limits | Acceleration (max): 4g | |||||
| Altitude (max): 50000m | ||||||
| Velocity (max): 500m/s | ||||||
| OTHER SPECIFICATIONS | ||||||
| Communication interface | UART (4800~921600bps, 9600bps by default), I2C (max 400KHz) | |||||
| Update rate | 1Hz (default), 18Hz (max) | |||||
| Protocol | NMEA 0183 Version 4.0 (V2.1, V2.3 or V4.1 selectable), UBX, RTCM 2.3 | |||||
| Power supply | 5V | |||||
| Overall current | <40mA@5V (Continue mode) | |||||
| Module current | 23mA@3V (Continue mode, tracking status) | |||||
| Operating temperature | -40℃ ~ 85℃ | |||||
| Dimensions | 65mm × 30.5mm | |||||
Compatible avec les cartes de la série Raspberry Pi, Jetson Nano
.jpg?1595618841306)
Prend en charge le GPS, Beidou, Galileo et GLONASS
.jpg?1595618883207)
Augmenter le système vise à améliorer la précision, l'exhaustivité, la fiabilité et la disponibilité du positionnement et de la navigation
Prend en charge les systèmes Augmenter, y compris SBAS, QZSS, IMES, D-GPS
.jpg?1595618921001)
Caractéristiques -167dBm de sensibilité de navigation, capacité exceptionnelle pour l'anti-spoofing et l'anti-brouillage
.jpg?1595619033172)
Un moyen simple de configurer le module
.jpg?1595619083921)
Idéal pour la gestion de flotte, le suivi des actifs, les systèmes de sécurité, les PDA industriels, les applications SIG, etc.
.jpg?1595619124796)
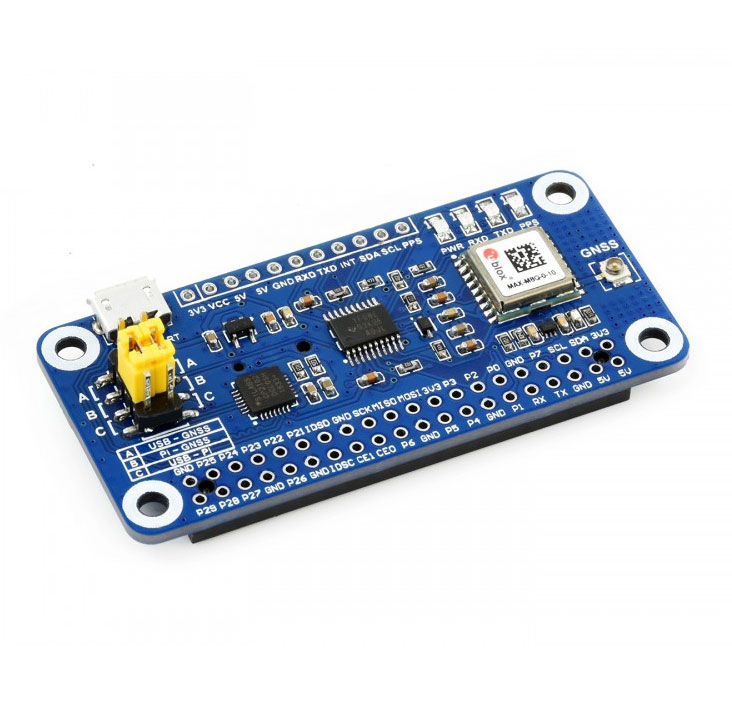
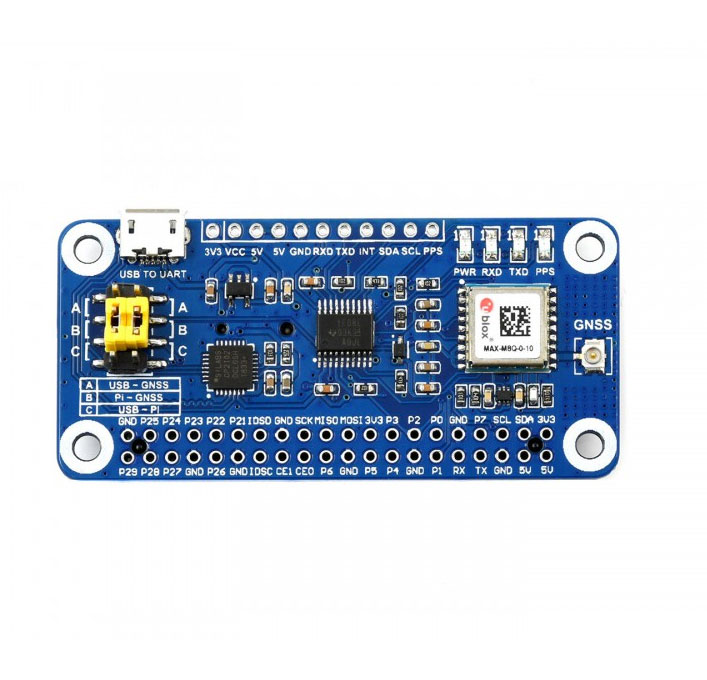
Ce qui est à bord
.jpg?1595619168398)
- MAX-M8Q module
- TXS0108EPWR voltage translator
- RT9193-33 power chip
- CP2102 USB TO UART converter
- Status indicators
RXD/TXD: UART TX/RX indicator
PPS: GPS status indicator
PWR: power indicator - Battery holder
supports ML1220 rechargeable cell, for preserving ephemeris information and hot starts
- Raspberry Pi GPIO header
for connecting with Raspberry Pi - UART, I2C interface
for connecting with other MCUs - USB TO UART port
- GNSS antenna connector
- UART selection jumper
A: control the MAX-M8Q through USB TO UART
B: control the MAX-M8Q through Raspberry Pi
C: access Raspberry Pi through USB TO UART
Définition du brochage
.jpg?1595619211551)
Dimensions du contour
.jpg?1595619249068)
Ressources et services
.jpg?1595619293223)
.jpg?1595619309937)


