

HAT de servomoteur de bus série, intègre ESP32 et circuit de servocommande, adapté aux servos de bus série série ST/RSBL
HAT de servomoteur de bus série
Conçu pour les servos de bus série, intègre l'ESP32 et le circuit de servocommande
Permet de contrôler jusqu'à 253 servos de bus série en même temps via ESP32 UART ou un port USB, peut être utilisé comme contrôleur principal des projets robotiques

Aperçu des fonctionnalités
- Permet de contrôler jusqu'à 253 servos de bus série série ST/RSBL en même temps
- Entrée de tension large de 9 à 25 V (la tension d'entrée et la tension du servo doivent correspondre)
- Basé sur le module ESP32-WROOM-32, prend en charge la communication filaire et sans fil
- Fournit plusieurs démonstrations de contrôle pour différents contrôleurs hôtes
- Prend en charge le contrôle des servos du bus série directement via le port USB Type-C intégré
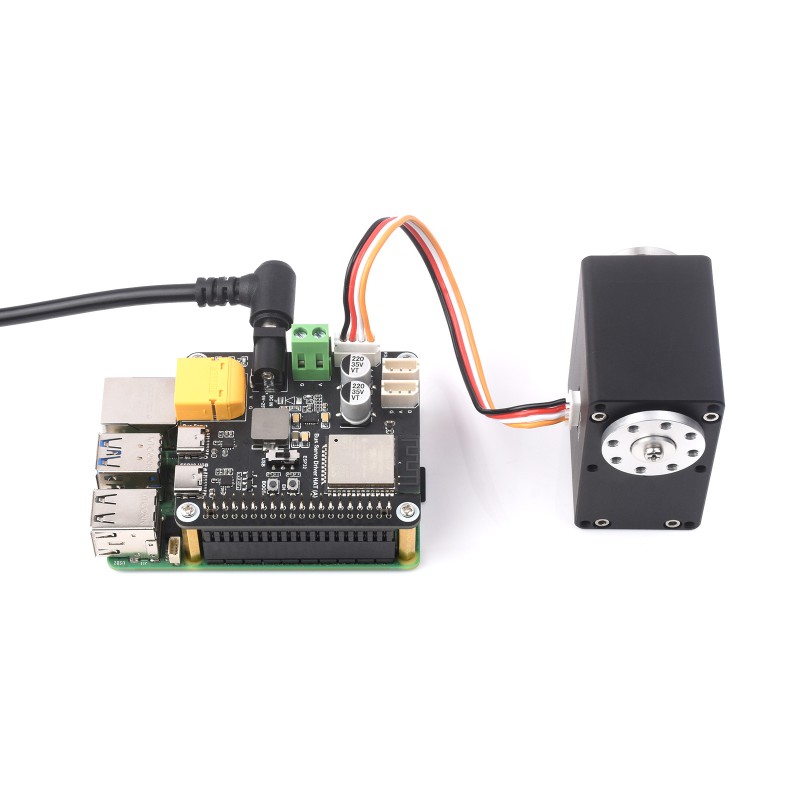
- Prend en charge la connexion au Raspberry Pi, alimente le Pi via un circuit régulateur abaisseur 5 V intégré et communique via l'interface GPIO UART, gestion soignée des câbles
Spécifications
| CONTRÔLEUR | ESP32-WROOM-32 |
|---|---|
| PORT D'ALIMENTATION ÉLECTRIQUE | Connecteur XT60, prise CC 5,5×2,5 mm |
| ALIMENTATION ÉLECTRIQUE | 9 ~ 25 V (la tension d'entrée et la tension du servo doivent correspondre) |
| INTERFACE DE COMMUNICATION | UART, port USB Type-C × 2 |
| COMMUNICATION SANS FIL | Wi-Fi 2,4 G |
| DIAMÈTRE DU TROU DE MONTAGE | 3mm |
| ESPACEMENT DES TROUS DE MONTAGE | 58×49 mm |
| TAILLE DU PCB | 65×57mm |
Exemples d'application
- Les servos fourniront diverses informations telles que la position, la vitesse, le verrouillage du couple et le mode de fonctionnement (mode servo, mode servomoteur, etc.) pour les projets avancés nécessitant un contrôle automatique en boucle fermée
- Le contrôleur hôte peut contrôler les servos du bus série en envoyant des commandes JSON et en obtenant des informations de retour au format JSON, plus pratique pour le développement secondaire.
- Choix idéal pour construire des robots quadrupèdes, des marcheurs hexapodes, des bras robotiques et d'autres projets robotiques nécessitant plusieurs servos


* images here are for reference ONLY
Servos compatibles
Prend en charge les servos de bus de la série ST/RSBL et sélectionne l'entrée d'alimentation en fonction du servo utilisé

Remarque : lorsque vous utilisez les différents modèles de servos en même temps, veuillez faire attention à savoir si la puissance absorbée peut répondre aux exigences de tous les servos.< /p>
Contrôle du bus série UART
Permet de contrôler jusqu'à 253 servos de bus série en même temps

* à titre de référence seulement, les servos sur la photo ne sont PAS inclus.
Remarque : bien qu'un canal UART puisse contrôler jusqu'à 253 servos de bus, en raison de la puissance élevée des servos, il est nécessaire de déterminer si la solution d'alimentation est suffisante en cas d'utilisation d'un trop grand nombre de servos.
Mode de contrôle filaire
Prend en charge l'envoi de commandes JSON à ESP32 pour contrôler les servos de bus série, ou l'envoi direct de commandes de contrôle aux servos via le port USB Type-C. Livré avec une démo Python.

Mode de contrôle sans fil
Le HAT (A) du servomoteur de bus établira automatiquement un point d'accès après la mise sous tension, permettant aux utilisateurs de connecter et de contrôler la carte de pilotage via des téléphones mobiles, des tablettes et des PC avec l'application Web multiplateforme que nous avons fournie

Convient pour Raspberry P 5/4B
Prend en charge l'alimentation du Pi et la communication via l'interface GPIO UART, gestion soignée des câbles


Contrôleur ESP32, ressources étendues, développement secondaire facile
WiFi et Bluetooth intégrés, ainsi que prise en charge ESP-NOW, pour le contrôle à distance et le débogage des servos

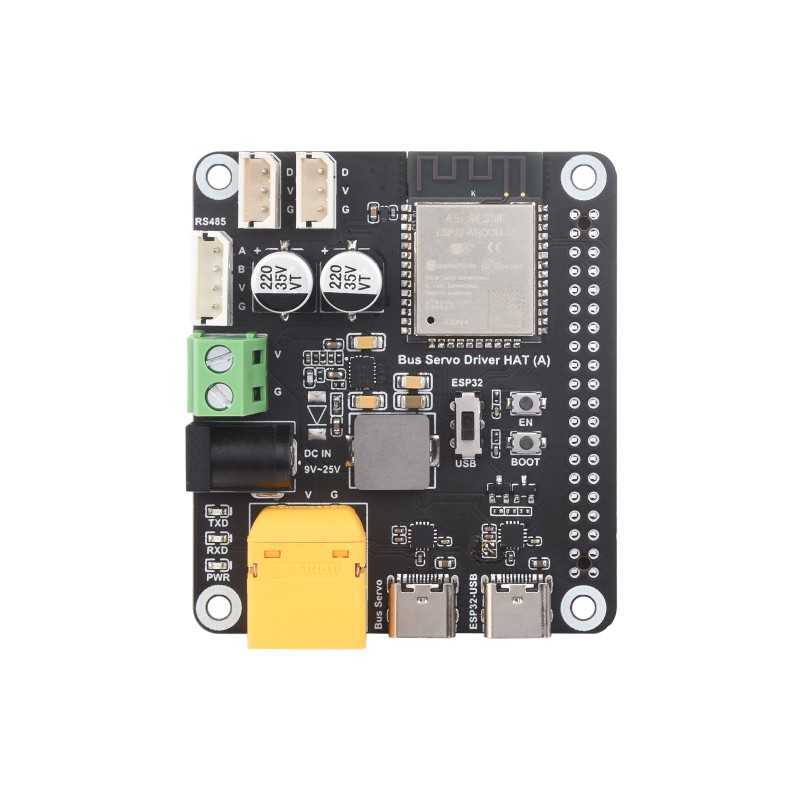
Qu'y a-t-il à bord

- Module ESP32
- Régulateur abaisseur DCDC 5 V
- Commutateur de commande UART
- Bouton de réinitialisation
- Bouton BOOT
pour accéder au mode de téléchargement - En-tête Raspberry Pi 40PIN
- Port ESP32 Type-C
- Port de type C pour servobus série
- Connecteur XT60
- Prise d'alimentation CC 5,5 × 2,5
- Bornier à vis d'alimentation
- Connecteur de servo de bus série RS485
- Connecteurs de servo de bus série TTL
Dimensions du contour



