
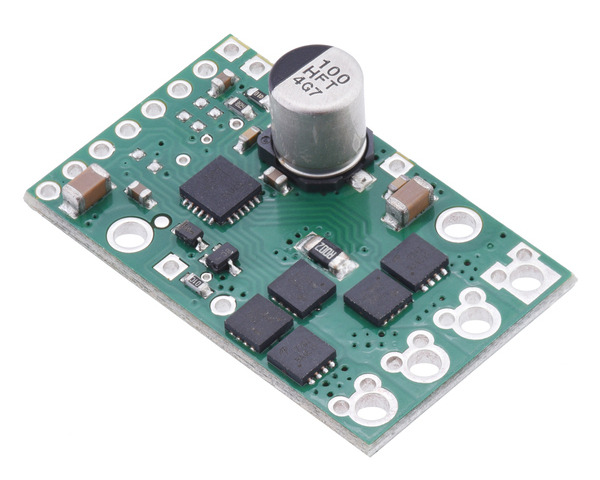
2992-POLOLU, Pololu G2 Pilote de Moteur Haute Puissance 24v13
Ce pilote de moteur en pont en H à MOSFET discrets permet un contrôle bidirectionnel d'un moteur à courant continu haute puissance. Le petit circuit de 1,3″ × 0,8″ prend en charge une large plage de tension de 6,5 V à 40 V et est suffisamment efficace pour fournir un courant continu de 13 A sans dissipateur thermique. Parmi les fonctionnalités supplémentaires de cette deuxième génération (G2) figurent la protection contre l'inversion de polarité ainsi que la détection de courant de base et la limitation de courant.
Remarque : Les tensions de batterie peuvent être bien supérieures aux tensions nominales lorsqu'elles sont chargées, c'est pourquoi nous recommandons une tension nominale maximale de 28 V sauf si des mesures appropriées sont prises pour limiter la tension de crête.
Caractéristiques :
- Tension de fonctionnement : 6,5 V à 40 V (maximum absolu)
- Courant de sortie : 13 A en continu
- Entrées compatibles avec les logiques 1,8 V, 3,3 V et 5 V
- Fonctionnement PWM jusqu'à 100 kHz
- Sortie de détection de courant proportionnelle au courant moteur (env. 40 mV/A ; active uniquement lorsque le pont en H est actif)
- Limitation de courant active (hachage) avec un seuil par défaut de 30 A (réglable à un seuil inférieur)
- Protection contre l'inversion de polarité
- Arrêt en cas de sous-tension
- Protection contre les courts-circuits
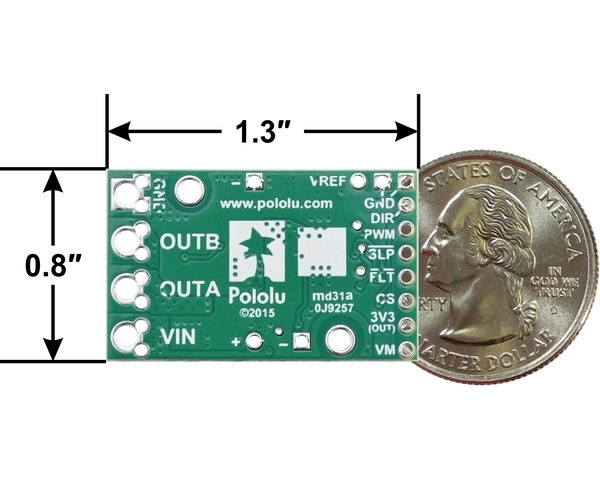
Dimensions :
| Taille : | 1,3″ × 0,8″ |
|---|---|
| Poids : | 3,3 g1 |
Spécifications générales :
| Canaux moteur : | 1 |
|---|---|
| Tension de fonctionnement minimale : | 6,5 V |
| Tension de fonctionnement maximale : | 40 V2 |
| Courant de sortie continu par canal : | 13 A3 |
| Détection de courant : | 0,04 V/A |
| Fréquence PWM maximale : | 100 kHz |
| Tension logique minimale : | 1,8 V |
| Tension logique maximale : | 5,5 V |
| Protection contre l'inversion de polarité : | Oui |
Remarques :
- 1
- Sans les connecteurs inclus.
- 2
- Maximum absolu ; des tensions plus élevées peuvent détruire définitivement le pilote de moteur. Le maximum recommandé est d'environ 34 V, afin de conserver une marge de sécurité pour l'ondulation de tension.
- 3
- Résultats typiques avec un cycle de service de 100 % à température ambiante.
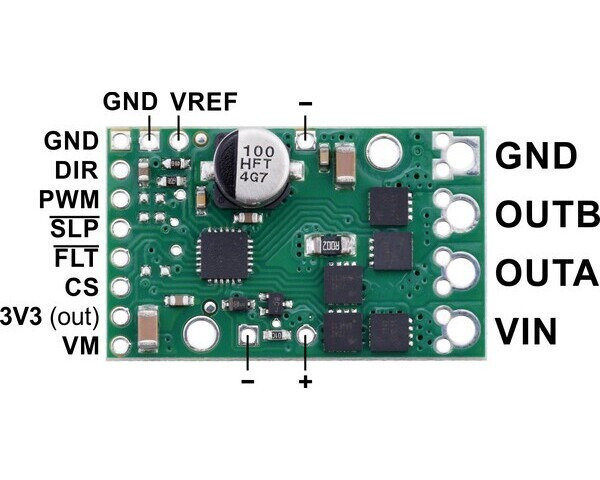
Brochage :

| PIN | État par défaut | Description |
|---|---|---|
| VIN | Connexion principale de l'alimentation moteur de 6,5 V à 40 V (maximum absolu). | |
| VM | Alimentation moteur après protection contre l'inversion de polarité. Pour les faibles courants uniquement. | |
| +, − | Pastilles pour condensateur d'alimentation (connecté entre VM et GND). | |
| 3V3 (out) | Sortie régulée à 3,3 V. Fournit quelques milliampères. Désactivée en mode veille. Attention : Ne pas court-circuiter avec la broche VM ! | |
| GND | Connexion de masse pour l'alimentation logique et moteur. | |
| OUTA | Sortie moteur A (vers une borne du moteur). | |
| OUTB | Sortie moteur B (vers l'autre borne du moteur). | |
| PWM | LOW | Entrée PWM pour contrôler la vitesse du moteur. |
| DIR | LOW | Entrée de direction (OUTA vers OUTB si haut, OUTB vers OUTA si bas). |
| SLP | HIGH | Entrée veille (active à l'état bas). Le module "md31c" la force à l'état haut par défaut. |
| FLT | Indicateur de défaut (actif à l'état bas, sortie en drain ouvert). | |
| CS | Sortie de détection de courant (~40 mV/A + décalage de 50 mV). | |
| VREF | Entrée de référence pour ajuster le seuil de limitation de courant. |
| Table de vérité du pilote moteur | ||||
|---|---|---|---|---|
| PWM | DIR | OUTA | OUTB | Fonctionnement |
| H | H | H | L | Avant |
| H | L | L | H | Arrière |
| L | X | L | L | Freinage |

Attention : Ce pilote moteur n'a pas d'arrêt automatique en cas de surchauffe. Une surchauffe ou un dépassement de courant peut causer des dommages permanents au pilote moteur.


