



Le 4990-POLOLU est un kit robot pour construire le Zumo 32U4 hautement intégré. Ce produit est basé sur un ATmega32U4. Son utilisateur programmable et hautement personnalisable.
REMARQUE : Moteurs, piles et câble USB NON inclus.
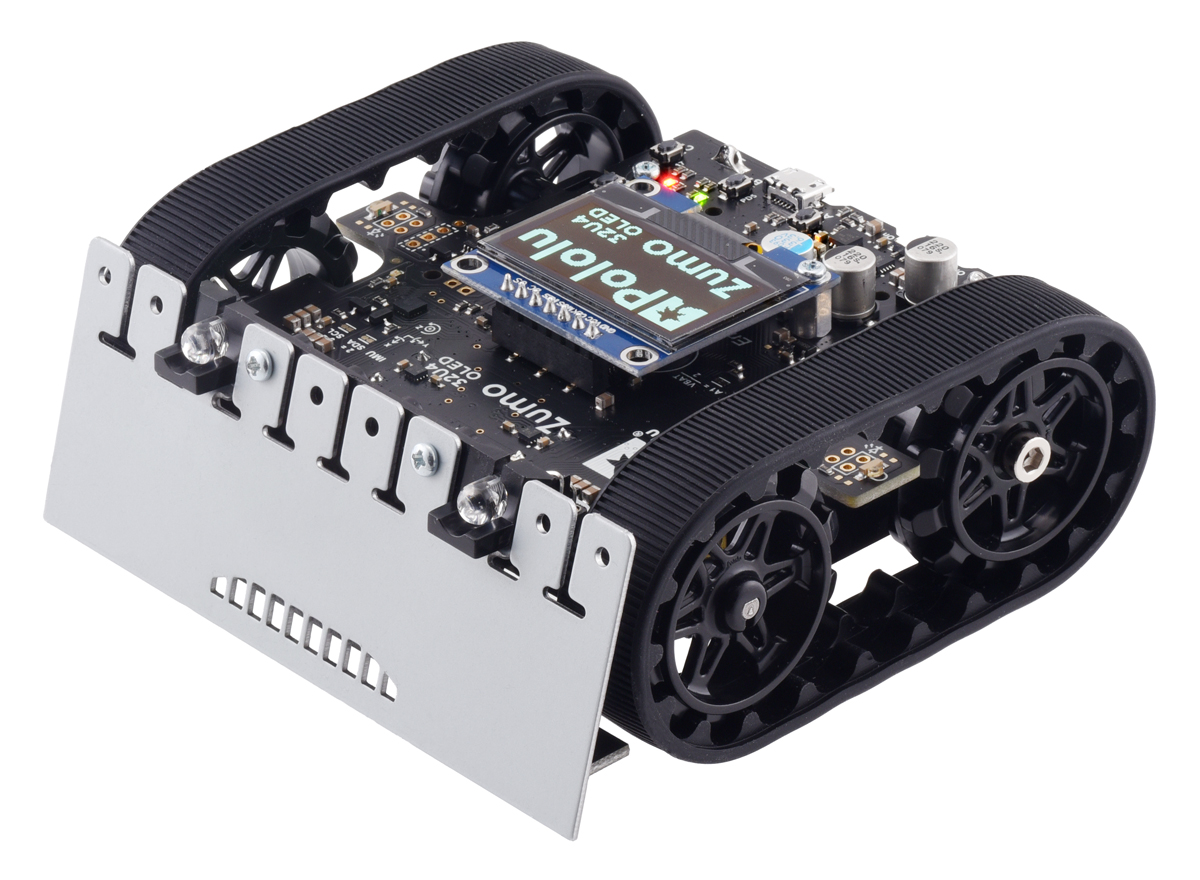
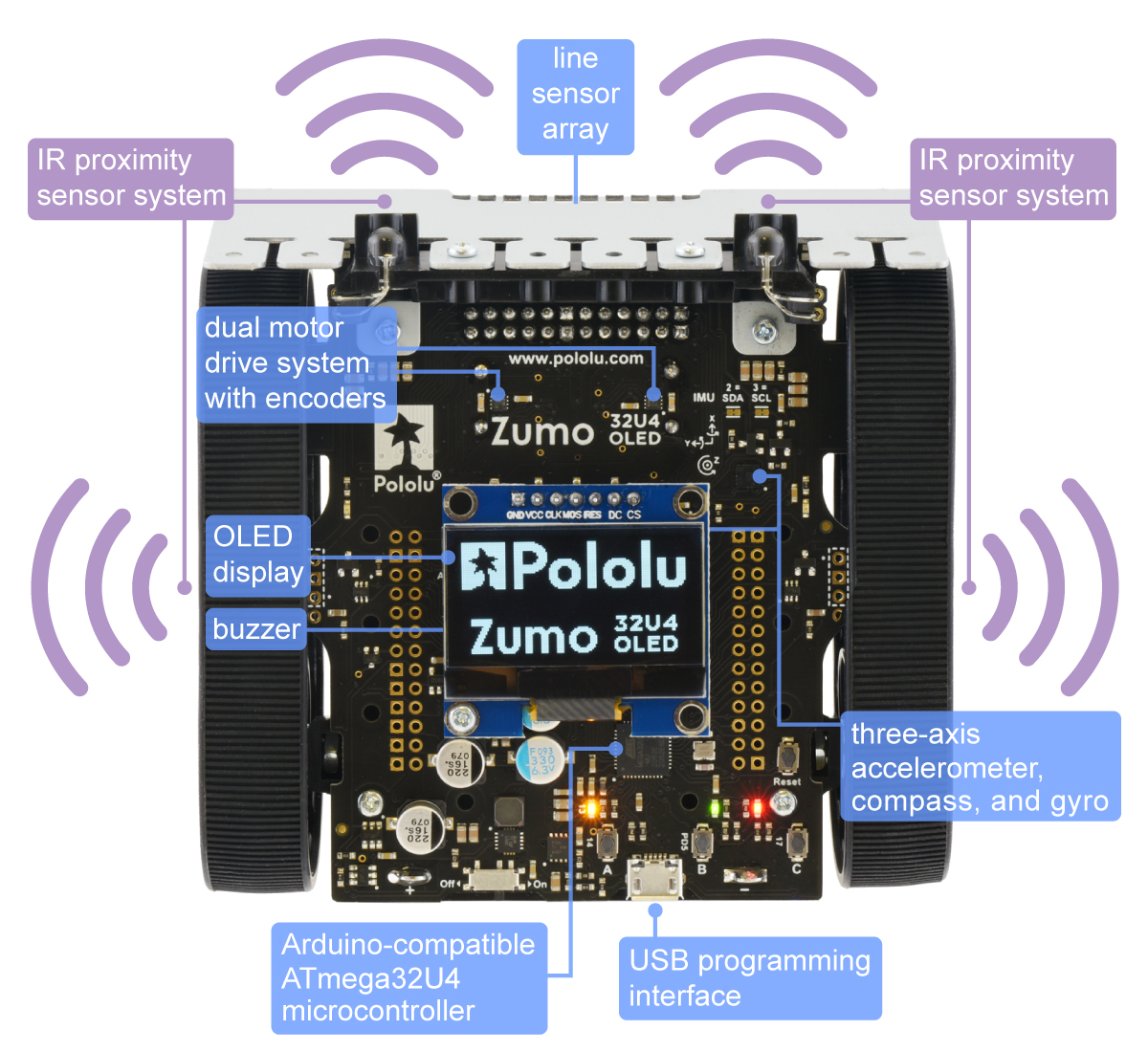
Le robot Pololu Zumo 32U4 OLED est un robot à chenilles polyvalent basé sur le microcontrôleur ATmega32U4 compatible Arduino, et ce kit contient la plupart des pièces dont vous avez besoin pour en construire un. Il vous suffit d'ajouter une paire de micro-moteurs à engrenages métalliques et quatre piles AA. . Il comprend des pilotes de moteur double intégrés, un écran graphique OLED, des encodeurs en quadrature, des capteurs de ligne, des capteurs de proximité latéraux et avant et une IMU complète. Le robot assemblé mesure moins de 10 cm × 10 cm, suffisamment petit pour se qualifier pour le Mini Sumo. Ce produit est un kit ; l'assemblage (y compris la soudure) est nécessaire.
Le Zumo 32U4 OLED est un robot à chenilles hautement intégré, programmable par l'utilisateur et personnalisable. Il mesure moins de 10 cm de chaque côté et pèse environ 275 g avec piles (160 g sans), il est donc à la fois assez petit et assez léger pour se qualifier pour les compétitions de Mini-Sumo, mais sa polyvalence le rend capable de bien plus que juste combats de sumo de robots.
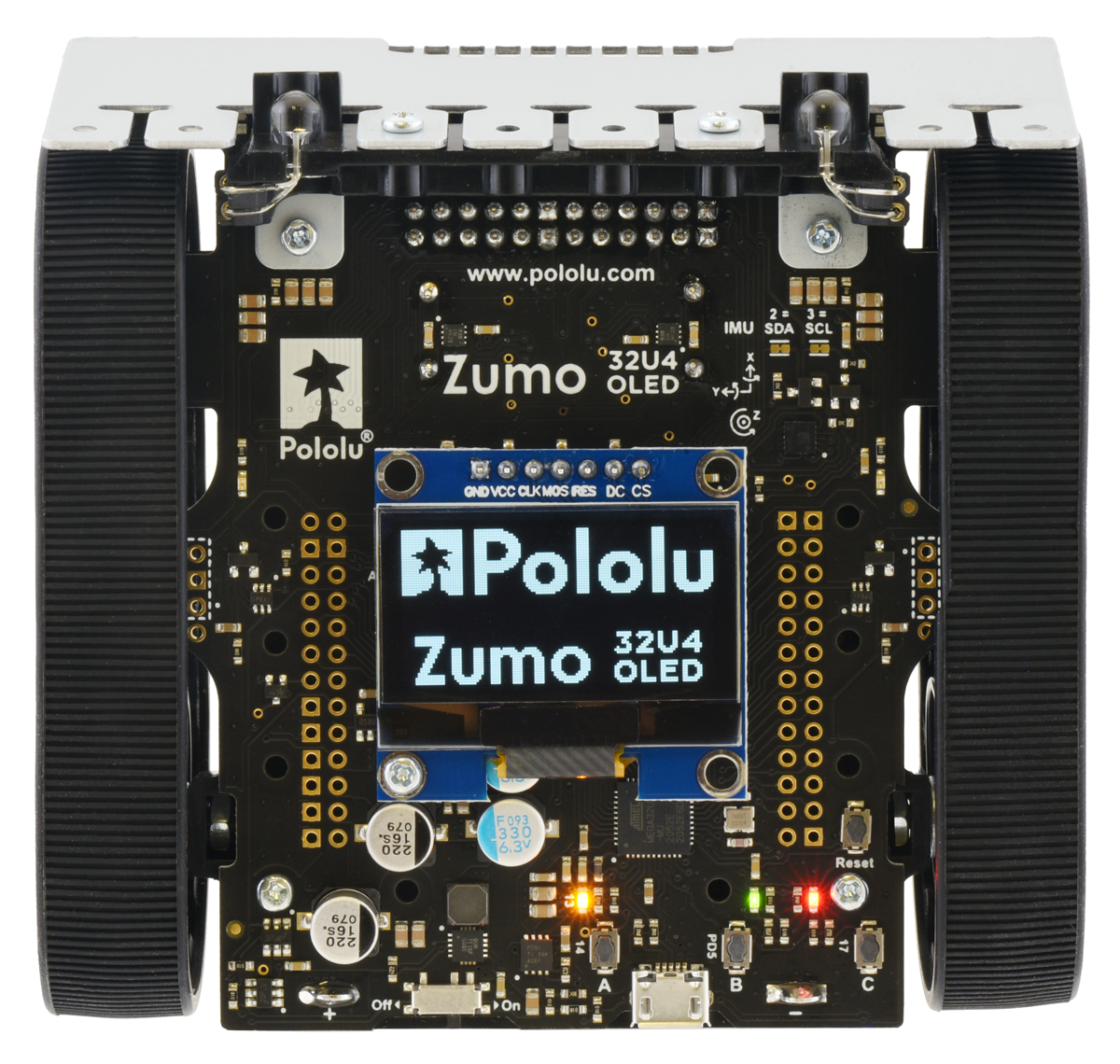
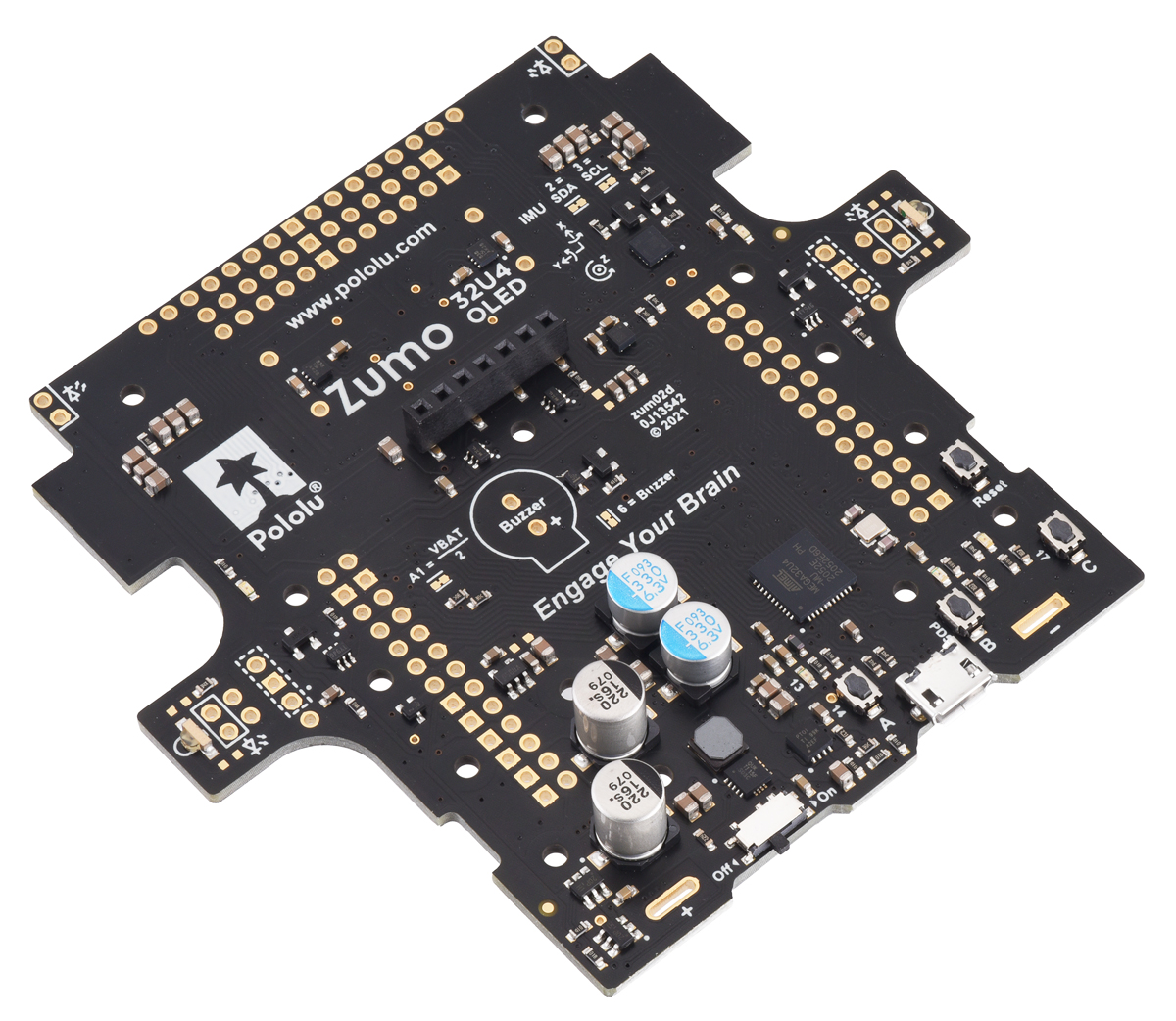
Au cœur du Zumo 32U4 se trouve un microcontrôleur ATmega32U4 AVR de Microchip (anciennement Atmel), et comme nos contrôleurs programmables A-Star 32U4 , le Zumo 32U4 dispose d'une interface USB et est livré préchargé avec un chargeur de démarrage compatible Arduino. Un logiciel complémentaire est disponible pour faciliter la programmation du robot à partir de l'environnement Arduino, et nous avons des bibliothèques Arduino et des exemples de croquis pour vous aider à démarrer. Un câble USB A vers Micro-B (non inclus) est requis pour la programmation. Pour les utilisateurs avancés qui souhaitent personnaliser ou améliorer leurs robots avec des périphériques supplémentaires, les rails d'alimentation du robot et les lignes d'E/S du microcontrôleur sont accessibles via des trous traversants espacés de 0,1″ le long des côtés et à l'avant de la carte principale.
Le Zumo 32U4 comprend deux pilotes de moteur à pont en H et une variété de capteurs intégrés, y compris une paire d'encodeurs en quadrature pour le contrôle du moteur en boucle fermée, une unité de mesure inertielle complète (accéléromètre à 3 axes, gyroscope et magnétomètre), cinq vers le bas- des capteurs de réflexion orientés vers l'avant pour le suivi de ligne ou la détection des bords, et des capteurs de proximité orientés vers l'avant et les côtés pour la détection et la télémétrie d'obstacles. Trois boutons-poussoirs intégrés offrent une interface pratique pour la saisie de l'utilisateur, et un écran graphique OLED 128 × 64, un avertisseur sonore et des voyants lumineux permettent au robot de fournir des commentaires.
Moteurs
Le châssis Zumo utilise deux micro-moteurs à engrenages métalliques, un pour chaque bande de roulement. Les moteurs idéaux pour votre robot dépendent du couple, de la vitesse et de la consommation de courant que vous souhaitez, doncles moteurs ne sont pas inclusavec la version kit du châssis (les moteurs sont inclus avec les versions assemblées du robot Zumo 32U4). Nous recommandons généralement d'utiliser des versions haute puissance (HP ou HPCB, qui ont des balais de carbone longue durée) de nos micromoteurs à engrenages métalliques car les chenilles nécessitent une quantité décente de couple pour se déplacer efficacement ; des rapports de démultiplication plus élevés des moteurs non HP peuvent fonctionner si vous souhaitez une consommation de courant plus faible, mais ils seront plus lents et offriront moins de contrôle. Plus précisément, nous recommandons principalement les moteurs 50:1, 75:1 ou 100:1 HP (ou HPCB) à utiliser avec ce châssis. Vous pouvez utiliser le tableau suivant pour comparer ces trois rapports de vitesse plus en détail.
| Micro motoréducteur en métal |
Vitesse de fonctionnement libre à 6 V |
Couple de décrochage @ 6V |
Courant de décrochage @ 6V |
Vitesse supérieure Zumo @ 6V et 500g |
|
|---|---|---|---|---|---|
| HP 50:1 ou HPCB 50:1 | 625 tr/min | 15 oz·po | 1600mA | 40 pouces/s | (100 cm/s) |
| HP 75:1 ou HPCB 75:1 | 400 tr/min | 22 oz·po | 1600mA | 25 po/s | (65 cm/s) |
| HP 100:1 ou HPCB 100:1 | 320 tr/min | 30 oz·po | 1600mA | 20 po/s | (50 cm/s) |
Ressources
- Guide de l'utilisateur
- Pilotes de Windows
- Schéma de brochage (carte principale)
- Diagramme schématique
- Diagramme des dimensions (carte principale)
- Modèle 3D (fichier .step)
Contenu du kit
- Kit de châssis Zumo
- Carte principale Zumo 32U4 OLED (cela comprend deux disques d'encodeur magnétique qui fonctionnent avec des capteurs d'encodeur intégrés dans la carte principale et un buzzer traversant )
- Matrice de capteurs avant Zumo 32U4
- Lame Zumo 32U4 en acier inoxydable et support LED IR en plastique
- écran OLED graphique


