






2,737 RPM Premium Planetary Gear Motor w/Encoder
Specs
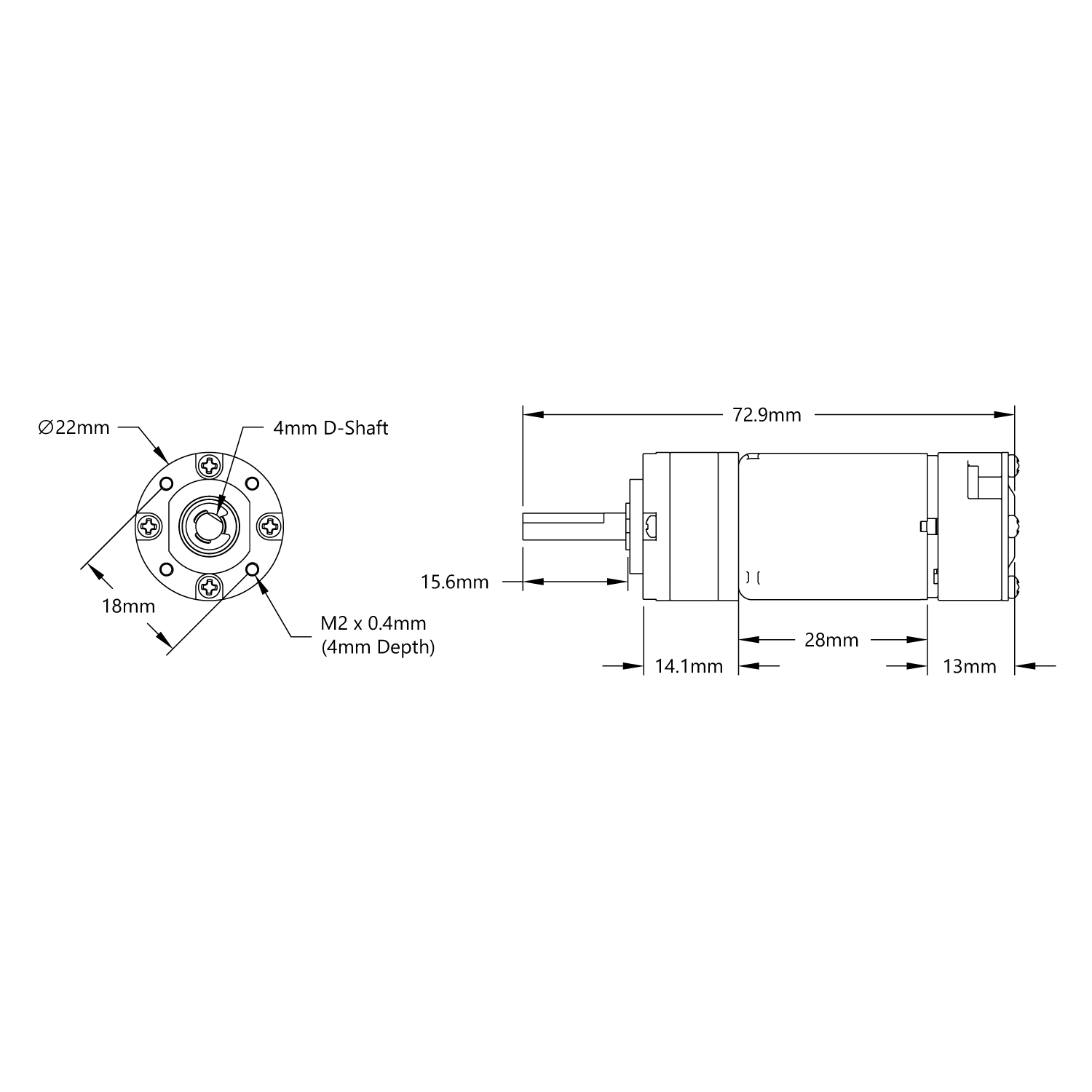
| Output Shaft Style | D-shaft |
|---|---|
| Motor Type | Brushed DC |
| Output Shaft Support | Dual Ball Bearings |
| Gear Material | Metal |
| Weight | 3.17 oz (90g) |
| Voltage (Nominal) | 12V |
| Voltage Range (Recommended) | 3V - 12V |
| Speed (No Load @ 12VDC) | 2,737 rpm |
| Current (No Load @ 12VDC) | 0.18A |
| Current (Stall @ 12VDC) | 4.9A |
| Torque (Stall @ 12VDC) | 9.7 oz-in (0.7 kgf-cm) |
| Gearbox Style | Planetary |
| Encoder: Cycles Per Revolution (Motor Shaft) | 3 |
| Encoder: Countable Events Per Revolution (Output Shaft) | 52.62 |
| Gear Ratio | 4.385:1 |
| Encoder Type | Relative, Quadrature |
| Encoder Sensor Type | Magnetic (Hall Effect) |
| Encoder Sensor Input Voltage Range | 2.4 - 26V |
| Encoder Sensor Output Pulse Amplitude | ~= Sensor Input Voltage |
Tech Tip
The pulse amplitude of the encoder’s output square wave signal is dependent on the voltage you supply the sensor. For example, if you provide 5V to Sensor Voltage +, then Channels A & B will have a pulse amplitude of 5V.
To enhance the resolution, the encoder is attached to the motor before the gearbox.
Gear train damage can occur if stalled (locked).
Downloads


