



GK-SERVO-9G geeekus Servomoteur analogique 180 degrés 9G
Le servomoteur 9G à 180 degrés de geeekus est livré avec un jeu de 4 cornes (contrairement aux servos SG90 similaires qui sont livrés avec 3 cornes) et est excellent pour les étudiants, les amateurs ou les éducateurs qui veulent faire bouger des objets.
Le servo a trois interfaces, distinguées par des lignes marron, rouge et orange (parfois les couleurs diffèrent). La ligne marron correspond à la masse (GND), la ligne rouge à l'alimentation 5V et la ligne orange à la borne de signal (signal PWM). L'angle de rotation du servo est contrôlé en régulant le cycle de travail du signal PWM (Pulse-Width Modulation). Le cycle standard du signal PWM est fixé à 20ms (50 Hz), et la largeur d'impulsion est répartie entre 1ms et 2ms. La largeur d'impulsion correspond à l'angle de rotation (0°~180°) du servo.

Paramètres
- Tension de fonctionnement : DC 4.8V〜6V
- Angle d'inclinaison : environ 180°.
- Vitesse à vide : 0,12±0,01 sec/60(DC 4,8V) ; 0,1±0,01 sec/60(DC 6V)
- Courant à vide : 200±20mA(DC 4.8V) ; 220±20mA(DC 6V)
- Couple d'arrêt : 1,1±0,01kg/cm(DC 4,8V) ; 1,3±0,1kg/cm(DC 6V)
- Courant d'arrêt : 600±30mA(DC 4.8V) ; 750±30mA(DC 6V)
- Courant de veille : 4±1mA(DC 4.8V) ; 4±1mA(DC 6V)
- Température de fonctionnement : -10℃〜50℃
- Température de sauvegarde : -20℃〜60℃
- Longueur du fil du moteur : 250 ± 5 mm
- Dimensions : 22.7mm*12.12mm*25.7mm
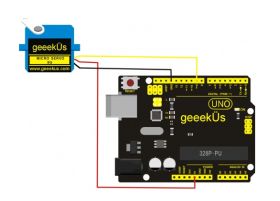
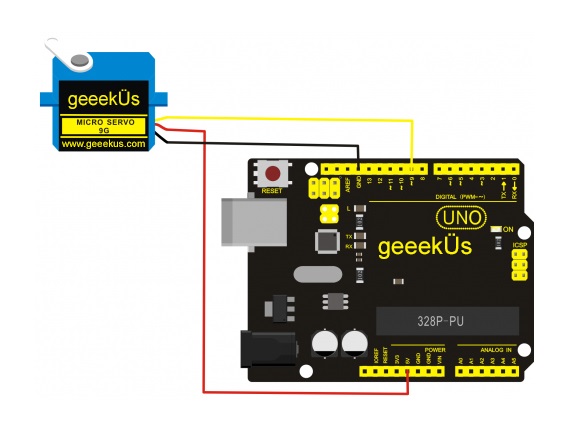
Schéma de connexion
Connecter le moteur à la broche numérique 9
Exemple de programme
Il existe deux façons de contrôler un servomoteur avec Arduino. La première consiste à utiliser un port de capteur numérique commun de l'Arduino pour produire une onde carrée avec un cycle de service différent pour simuler un signal PWM et utiliser ce signal pour contrôler le positionnement du moteur. Une autre méthode consiste à utiliser directement la fonction Servo de l'Arduino pour contrôler le moteur. De cette manière, le programme sera plus facile, mais il ne peut contrôler qu'un moteur à deux contacts pour la fonction servo, seules les broches numériques 9 et 10 peuvent être utilisées. La capacité d'entraînement de l'Arduino est limitée. Par conséquent, si vous avez besoin de contrôler plus d'un moteur, vous aurez besoin d'une alimentation externe.
Méthode 1 :
Exemple de programme A
Méthode 2 :
Examinons d'abord la fonction servo intégrée d'Arduino et quelques déclarations courantes.
- 1. attach(interface)--choisir la broche pour le servo, ne peut utiliser que la broche 9 ou 10.
- 2. write(angle)--utilisé pour contrôler l'angle de rotation du servo, peut régler l'angle entre 0 degré et 180 degrés.
- 3. read()--utilisé pour lire l'angle du servo, considéré comme une fonction pour lire la valeur dans la fonction write().
- 4. attached()--détermine si le paramètre du servo est envoyé à la broche du servo.
- 5. detach()-- déconnecte le servo et la broche, et la broche (broche numérique 9 ou 10) peut être utilisée pour le port PWM.
Note : la forme écrite des instructions ci-dessus est « nom de la variable servo. instruction spécifique () », par exemple myservo. Attach (9).
Connectez toujours le servo à la broche 9.
Exemple de programme B
#include <Servo.h>
/*define a header file. Special attention here, you can call the servo function directly from Arduino's software menu bar Sketch>Importlibrary>Servo, or input #include <Servo.h>. Make sure there is a space between #include and <Servo.h>. Otherwise, it will cause compile error. */
Servo myservo;// define servo variable name
void setup()
{
myservo.attach(9);// select servo pin(9 or 10)
}
void loop()
{
myservo.write(180);// set rotate angle of the motor
}


