


Carte de pilote générale pour robots, basée sur ESP32, multifonctionnelle, prend en charge les communications WIFI, Bluetooth et ESP-NOW, compatible avec Raspberry Pi et Jetson Nano
Pilote général pour robots
Carte de pilote multifonctionnelle conçue pour les robots, offrant plus de possibilités

Fonctionnalités en un coup d'œil
- Basé sur le module ESP32-WROOM-32, prend en charge les communications sans fil telles que WIFI, Bluetooth et ESP-NOW
- Interfaces de commande de moteur embarquées pour 2 moteurs à courant continu avec encodeur ou 4 moteurs à courant continu (2 groupes) sans encodeur
- Interfaces de contrôle de servos de bus série embarquées pour contrôler jusqu'à 253 servos de bus série ST3215 et obtenir des retours de servos
- IMU 9 axes embarquée pour obtenir des informations d'attitude et de cap à tout moment
- Prend en charge une entrée d'alimentation de 7 à 13 V et peut être alimenté directement par un module de batterie au lithium 2S ou 3S
- Circuit de téléchargement automatique pour télécharger facilement des programmes
- Prise en charge de la surveillance de la tension/du courant d'entrée
- Emplacement pour carte TF intégré
- Interface Laser Lidar embarquée et fonction UART vers USB intégrée
- Interface I2C pour connecter des périphériques tels que OLED, IMU et autres appareils I2C
- Adaptation de l'en-tête étendu multifonctionnel pour des fonctions supplémentaires, telles que le contrôle de servos ou de relais
- En-tête GPIO 40PIN intégré pour connecter et alimenter l'ordinateur hôte (Raspberry
- Pi/Jetson Nano, etc.), communiquant via un port série ou I2C
- Fournit des démos open source et des didacticiels détaillés pour les débutants, faciles à démarrer
Spécifications
| MODULE DE CONTRÔLE | ESP32-WROOM-32 | PUCE DE CONTRÔLE | ESP32 |
|---|---|---|---|
| ALIMENTATION ÉLECTRIQUE | CC 7~13V | INTERFACE D'ALIMENTATION | XH2.54 |
| CONNECTEUR D'ANTENNE | IPEX1 | INTERFACE DE TÉLÉCHARGEMENT | Type-C |
| COMMUNICATION SANS FIL | WIFI, Bluetooth, ESP-NOW | DIMENSIONS | 65 × 65mm |
| ESPACEMENT DES TROUS DE MONTAGE | 49 × 58mm | DIAMÈTRE DU TROU DE MONTAGE | 3 mm |
Interfaces périphériques riches
Convient à différents types de robots

Contrôleur principal ESP32
Ressources riches pour le développement secondaire
WiFi et Bluetooth intégrés, ainsi que la prise en charge ESP-NOW, pour la communication sans fil

Prend en charge plusieurs connexions périphériques

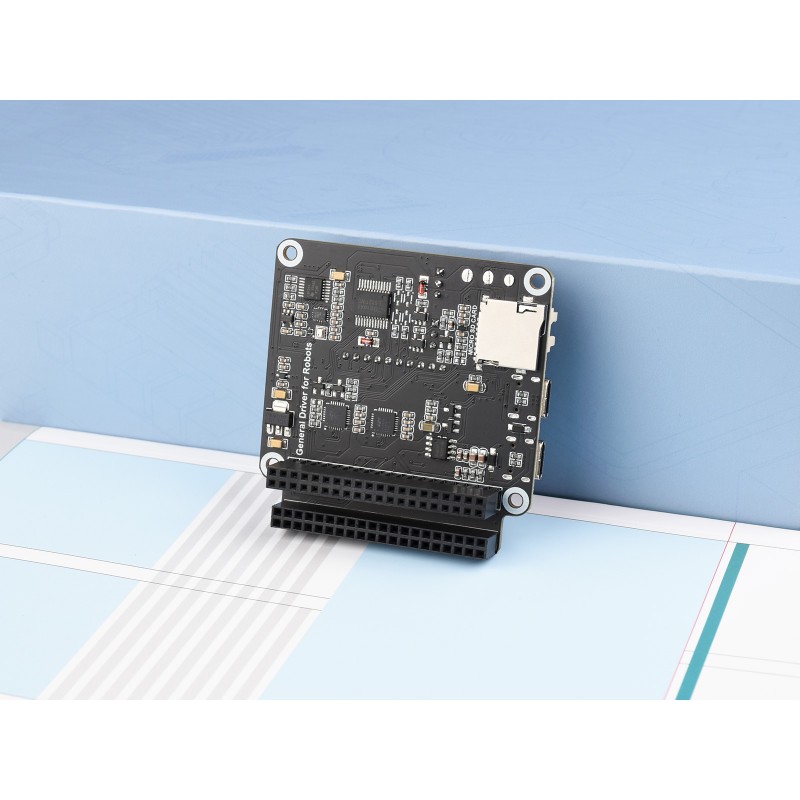
En-tête étendu GPIO 40 PIN
L'en-tête 40PIN du côté intérieur sert à se connecter directement au Raspberry Pi ou à d'autres cartes hôtes. Et étendez l'en-tête 40PIN du côté extérieur pour la connexion avec d'autres HAT via des câbles

Servocommande de bus série
Permet de contrôler jusqu'à 253 servos de bus série ST3215 en même temps

Remarque : Un canal UART peut contrôler jusqu'à 253 servos de bus, mais en raison de la puissance élevée des servos, il est nécessaire de déterminer si la solution d'alimentation est suffisante lorsque vous utilisez trop de servos.
Surveillance de la tension et du courant
Puce de surveillance de tension/courant intégrée pour obtenir l'état de l'alimentation électrique du robot à tout moment

IMU 9 axes embarquée
Intégré QMI8658C + AK09918, pour détecter le mouvement, l'orientation et le support magnétique pour obtenir l'angle de cap du robot à tout moment et n'importe où

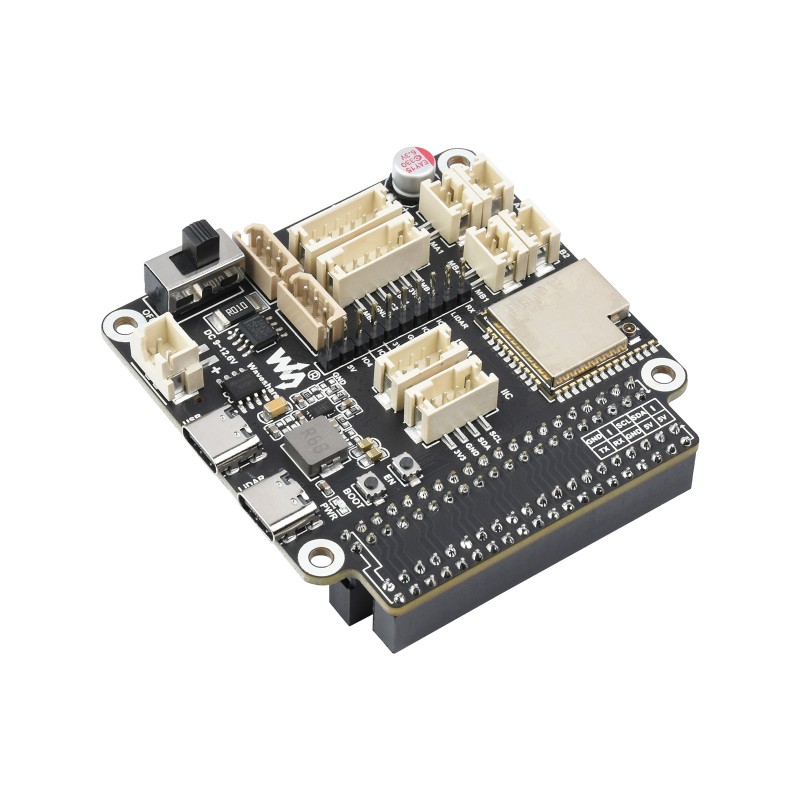
Ce qu'il y a à bord

- Module de contrôleur ESP32-WROOM-32
Peut être développé à l'aide de l'IDE Arduino - Connecteur WIFI IPEX1
Pour connecter l'antenne WIFI afin d'augmenter la distance de communication sans fil - Interface LIDAR
Fonction d'adaptateur radar intégrée - Interface d'extension périphérique I2C
Pour la connexion avec un écran OLED ou d'autres capteurs I2C - Bouton de réinitialisation
Appuyez et relâchez pour redémarrer l'ESP32 - Bouton de téléchargement
L'ESP32 entrera en mode de téléchargement après la mise sous tension - Circuit régulateur de tension DC-DC 5V
Alimentation pour ordinateurs hôtes tels que Raspberry Pi ou Jetson nano - Port de type C (LADAR)
Transmission de données LIDAR - Port de type C (USB)
Interface de communication ESP32, pour télécharger des programmes vers ESP32 - Port d'alimentation XH2.54
Prend en charge l'entrée DC 7 ~ 13V, peut alimenter directement les servos et moteurs du bus série - INA219
puce de surveillance tension/courant - Marche/Arrêt
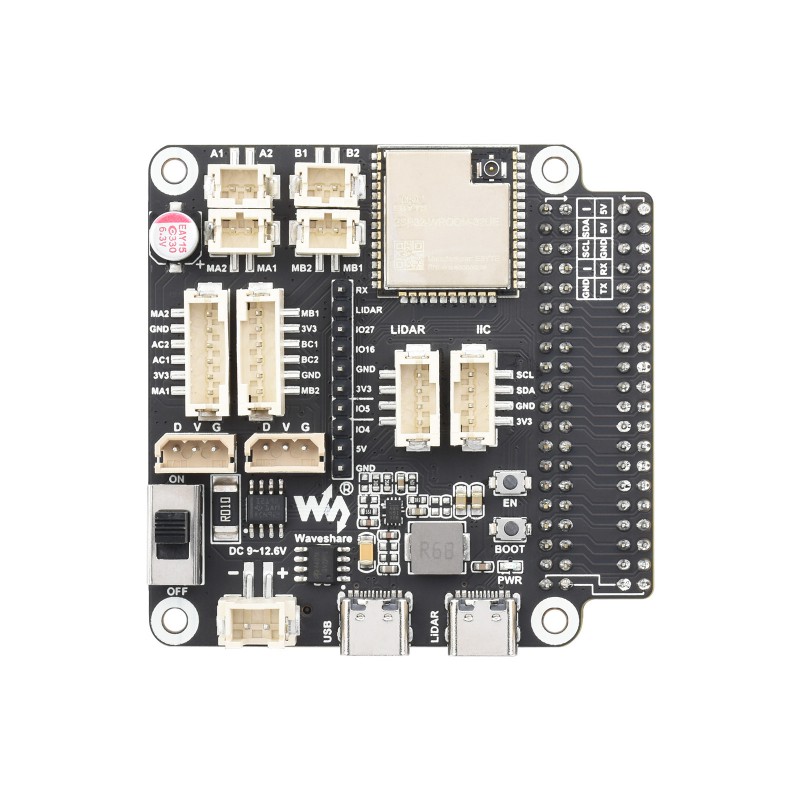
Alimentation externe MARCHE/ARRÊT - Interface de servo de bus série ST3215
Pour la connexion avec le servo de bus série ST3215 - Interface moteur PH2.0 6P
Interface groupe B pour moteur avec encodeur
- Interface moteur PH2.0 6P
Interface groupe A pour moteur avec encodeur - Interface moteur PH2.0 2P
Interface groupe A pour moteur sans encodeur - Interface moteur PH2.0 2P
Interface groupe B pour moteur sans encodeur - AK09918C
Boussole électronique 3 axes - QMI8658C
Capteur de mouvement à 6 axes - TB6612FNG
Puce de contrôle moteur - Circuit de servocommande de bus série
pour contrôler plusieurs servos de bus série ST3215 et obtenir le retour des servos - Fente pour carte TF
Peut être utilisée pour stocker des journaux ou des configurations WIFI - En-tête GPIO 40PIN
Pour la connexion avec Raspberry Pi ou d'autres cartes hôtes - En-tête étendu 40PIN
Facile à utiliser les broches GPIO de Raspberry Pi ou d'autres cartes hôtes - CP-2102
UART vers USB, pour la transmission de données radar - CP-2102
UART vers USB, pour communication ESP32 - Circuit de téléchargement automatique
Pour télécharger des programmes sur l'ESP32 sans appuyer sur les boutons EN et BOOT
Fournit des démos open source et des didacticiels détaillés

Produit


Dimensions

Ressources & Services