

The Servo Six controller Interface board simplifies the process of connecting up to six servo motors to a Raspberry Pi or Arduino.
It connects to the Raspberry Pi via seven pins (six GPIO and one GND). As it has so few connections, it doesn’t function as a HAT; instead, you’ll be connecting it via the jumper cables (not provided). This is better for a lot of projects, as it means the rest of the GPIO pins are available for other bits. You’ll need to figure out a workaround if you do have a HAT as part of your project, though.
Features:
- Screw terminals for servo power supply
- Reverse-polarity protection for the servo power supply
- 470µF 16V capacitor for servo supply
- 470Ω current limiting resistors for servo control lines (to protect GPIO pins)
- Power indicator LED
Connecting a Servo Six board to a Raspberry Pi
To connect a ServoSix board to a Raspberry Pi you need a female to female jumper wire to connect ground (GND) on the Raspberry Pi to GND on the ServoSix board. For each servo (up to six) that you want to control, you also need a female to female jumper wire connecting the control pin for that servo on the ServoSix board to one of the GPIO pins on the Raspberry Pi.
As a hint, the ServoSix board has the GPIO pin to be used with a particular control pin written next to it.

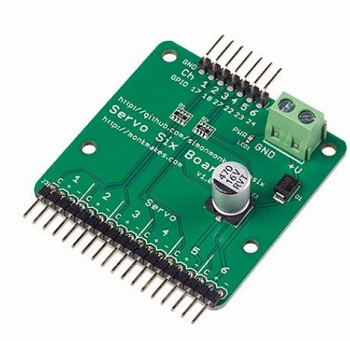
So, looking at the picture above, the left most pin is GND and should be connected to a GND pin on the Raspberry Pi. The next pin along (control pin 1) should be connected to GPIO17 on the Raspberry Pi, control pin 2 on the ServoSix to GPIO18 and so on.
Power for the motors must be supplied separately using the screw terminal on the right.

Software (Raspberry Pi)
The easiest way to control servos from Python is to use the official Raspberry gpio zero library. This provides a handy class called AngularServo.
Here’s an example that should get you started. Connect a servo to channel 1 as shown above.
from gpiozero import AngularServo
from guizero import App, Slider
servo = AngularServo(17, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
def slider_changed(angle):
servo.angle = int(angle)
app = App(title='Servo Angle', width=500, height=150)
slider = Slider(app, start=-90, end=90, command=slider_changed, width='fill', height=50)
slider.text_size = 30
app.display()
When you run the program, a window will open with a slider. Move the slider left and right and the servo should follow.

Please note that we are no longer actively maintaining the ServoSix library.
Software (Arduino)
When using the Servo Six with an Arduino, you can just use the standard Arduino Servo library.
The following sketch assumes that a servo is attached to channel 1 and that channel 1 is linked to pin 2 of the Arduino. Use the serial monitor to enter an angle between 0 and 180 degrees.
#include <Servo.h>
const int servoControlPin = 2;
Servo servo;
void setup() {
servo.attach(servoControlPin);
Serial.begin(9600);
Serial.println("Angle in degrees (0 to 180)");
} void loop() {
if (Serial.available()) {
int angle = Serial.parseInt();
servo.write(angle); }
}



