
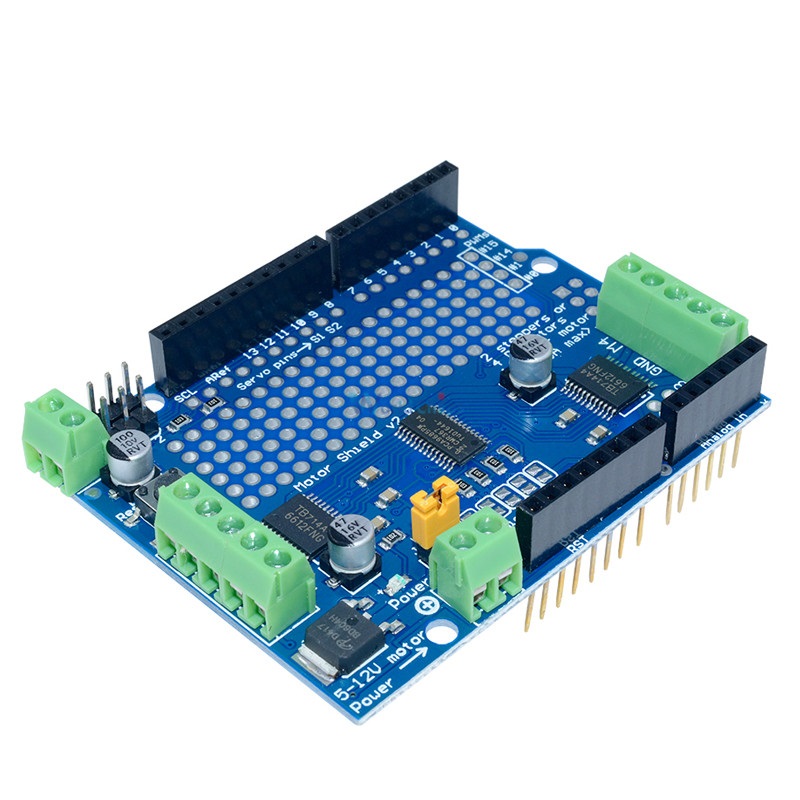
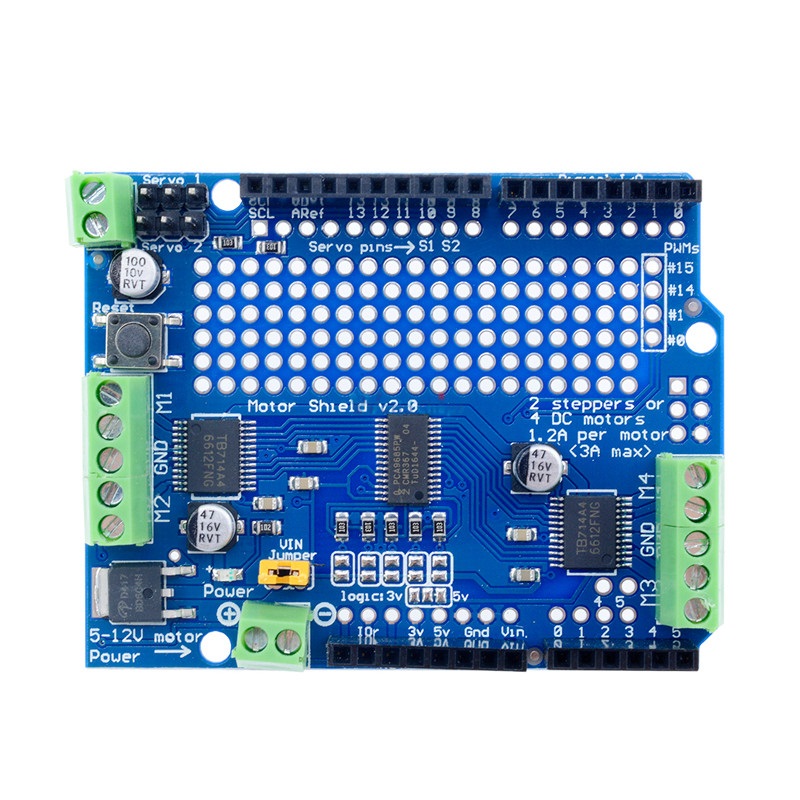
TB6612 1.2A par canal, carte interface à quadruple/quatre moteurs pour les microcontrôleurs Arduino
Application:
- Pilote à quatre moteurs (Entrées M1, M2, M3 et M4) entraînent quatre moteurs indépendamment, soit vers l'avant, soit vers l'arrière.
- Généralement trouvé dans Voiture RC, Voiture Autonomes et Voiture Arduino.
- Moteur Dual Stepper (M1 + M2 et M3 + M4) pour piloter deux moteurs pas à pas de manière indépendante.
- Diodes Flyback intégrées pour empêcher le courant inverse lorsque le moteur pas à pas/DC à courant continu est filé à la main.
- Chute de tension inférieure pour un couple plus élevé via le fonctionnement de la batterie.
- La puce de pilote PWM dédiée (PCA9685) permet le contrôle de la vitesse et de la direction du moteur via I2C.
- Peut être utilisé pour piloter des charges inductives telles que des relais, des solénoïdes et des moteurs pas à pas bipolaires.
- Alimentez la tension externe de 5 à 12 VCC en utilisant le bornier VIN.
Fonctionnalités:
- Écran empilable pour des blindages de capteur supplémentaires.
- Blocs de jonction à vis vertes pour simplifier la fixation de la charge et de la source.
- Trous de montage pour ajouter des entretoises ou des entretoises.
- Fournitures 1.2A par canal.
- Bouton de réinitialisation facile d'accès.
- Trou traversant pour les besoins supplémentaires du projet
- Direction et vitesses du moteur contrôlables I2C.
- Conçu pour les moteurs 5v-12vdc SEULEMENT.
- En-têtes asservis situés à côté du bouton-poussoir de réinitialisation. (Broche numérique 9 et 10
Caractéristiques:
- Tension d'alimentation: 5 - 12VDC
- Alimentation en courant par canal: 1.2A
- IC: TB6612 et PCA9685
- PWM Capable
- I2C Moteur sélectionner
- Moteurs pas à pas et moteurs CC: 5-12VDC
- Servo 5V


