



Pilote d'éclairage et de moteur pour Python (V1.0)
Il s'agit d'une carte pilote PWM avec quatre méthodes de réglage, à savoir, le contrôle direct du code Python, le contrôle de l'ordinateur hôte PC, le contrôle de la programmation de la communication UART et le contrôle manuel du potentiomètre.
Il est utilisé dans des scénarios d'application tels que le contrôle de la vitesse du moteur à courant continu et le réglage de la lumière.
Ce produit prend en charge une entrée de tension large de 5 V à 24 V et a une capacité de charge de 10 A, ce qui peut entraîner un moteur à courant continu d'environ 10 W ou une bande lumineuse à LED d'environ 5 mètres.
Il convient au contrôle du volume d'eau de la pompe à eau, au contrôle de la vitesse du ventilateur de refroidissement, au réglage de la luminosité de la lumière, à la transformation des outils électriques, aux tests de produits moteur/bande LED, au contrôle de l'automatisation de la vitesse du moteur, au contrôle de l'automatisation des effets d'éclairage et à d'autres scènes.

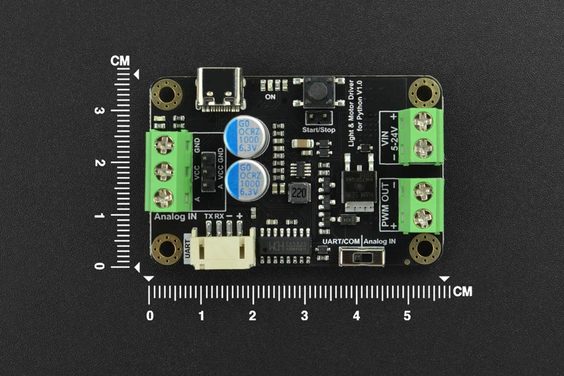
Aperçu du carte

Dimensions du produit
CARACTÉRISTIQUES
- Simple et facile à utiliser
Programmation de code Python, aucune carte mère ou adaptateur requis. - Plug and play
Contrôle du logiciel Windows, aucune programmation requise, - Contrôle de la communication UART
Pratique pour une utilisation à long terme des équipements embarqués. - Contrôle par potentiomètre externe
Contrôle manuel, aucune programmation requise. - Protocole MODBUS standard
Le protocole est public et vous pouvez personnaliser de manière flexible votre propre méthode de contrôle. - Prise en charge d'une large tension de 5 V à 24 V
Convient à divers moteurs et bandes lumineuses. - Conduite par un tube MOS à courant élevé, capacité de charge de 10 A
APPLICATIONS
- Contrôle du code Python
1. Connectez l'interface USB, vous pouvez directement utiliser le code Python pour contrôler automatiquement la vitesse du moteur et l'effet d'éclairage. Aucune carte mère ou adaptateur supplémentaire n'est requis.
2. Peut être utilisé très facilement sur les ordinateurs Windows, les ordinateurs Apple, Raspberry Pi, les ordinateurs industriels ou LattePanda.
- Communication par port USB, contrôle informatique
1. Lors de la refonte d'un ventilateur de refroidissement de PC, d'une pompe à eau de refroidissement, etc., vous pouvez contrôler manuellement l'appareil sur PC ou le faire ajuster automatiquement en lisant la température du processeur.
2. Étant donné que l'ordinateur hôte peut ajuster avec précision la fréquence et le rapport de service, ce pilote peut être utilisé pour tester des produits à moteur à courant continu ou à bande lumineuse, ou pour optimiser un petit équipement.
3. Fabriquez un petit ventilateur dont la vitesse du vent peut être automatiquement ajustée ou contrôlée sur l'ordinateur. Il suffit de brancher l'USB pour l'utiliser.
4. Protocole de communication MODBUS.
- Communication UART, contrôle de programmation
1. Créez un projet avec des effets spéciaux, ou activez-le à une heure précise, ou ajustez les effets d'éclairage, ou utilisez-le avec des capteurs. Par exemple, un ventilateur qui ajuste automatiquement la force du vent et une bande lumineuse qui change automatiquement sa luminosité.
2. Contrôle automatique du débit d'eau de l'aquarium ou de la pompe d'arrosage.
3. Contrôle automatique des lumières d'ambiance du festival.
- Contrôle manuel du potentiomètre
1. Rénovation d'électroménager, fabrication de ventilateurs réglables.
2. Production d'outils électriques, transformation, vitesse réglable.
3. contrôle des effets d'éclairage de la bande lumineuse.
SPÉCIFICATION
- Plage de tension d'entrée : 5 V ~ 24 V
- Courant de contrôle maximal : 10 A
- Plage de réglage du rapport de service PWM : 0~255
- Plage de réglage de fréquence PWM : 183 Hz à 46875 Hz
- Nombre de canaux PWM : 1 canal
- Bouton Marche/Arrêt : x1
- Mode de contrôle :
Réglage du potentiomètre externe
Contrôle de la communication UART
Contrôle de l'ordinateur hôte du port USB
Contrôle Python - Interface USB : Type-C
- Interface UART : PH2.0-4P
- Interface de potentiomètre externe : embase à 2,54 broches, borne de connexion
- Taille du trou de montage : 30 mm x 50 mm, diamètre 3,1 mm
- Taille du PCB : 37 mm x 57 mm/1,46 x 2,24 pouces
DOCUMENTS
LISTE D'EXPÉDITION
- Pilote d'éclairage et de moteur pour Python x1
- Câble Gravity 4P (à connecter à UART) x 1


