
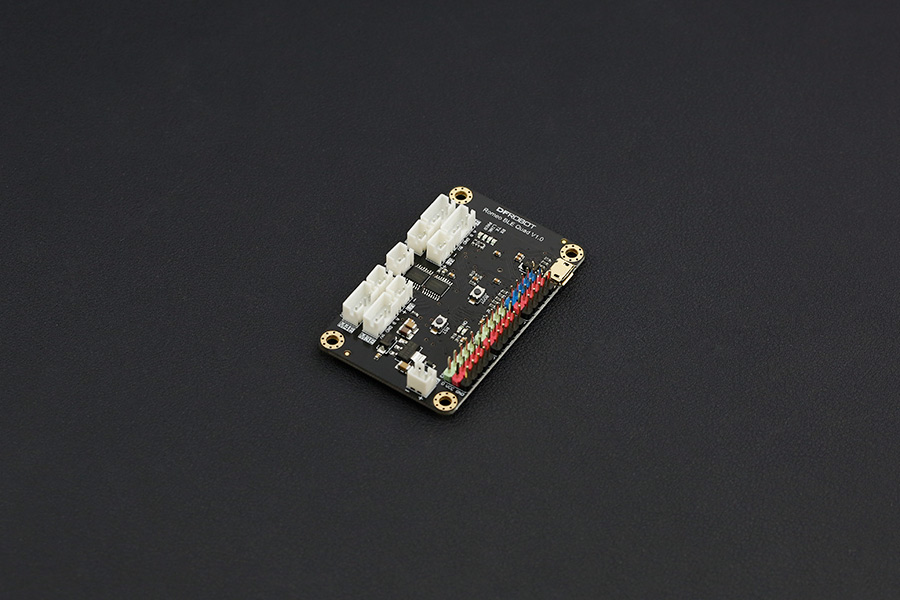



DFR0398 Romeo BLE Quad - STM32 Carte de contrôle avec Quad Pilote de moteur CC & Bluetooth 4.0
Romeo BLE Quad est un contrôleur de robot compatible arduino basé sur la puce STM32 ARM. Il hérite de toutes les fonctionnalités du Bluno M3, y compris le support de programmation sans fil, la communication sans fil entre les applications iOS / Android et la télécommande. Au-delà de cela, il comprend également un moteur à courant continu à 4 voies et des interfaces de codeur. Vous pouvez implémenter un robot avec contrôle de boucle fermée PID directement avec notre motoréducteur TT.
En plus de cela le Romeo BLE Quad offre des performances puissantes grâce au microcontrôleur STM32 ARM 32 bits avec plus d'espace de stockage et plus de ressources d'interface. DFRobot a développé un firmware sur mesure pour le rendre compatible avec Arduino IDE et accessible aux débutants à la robotique.
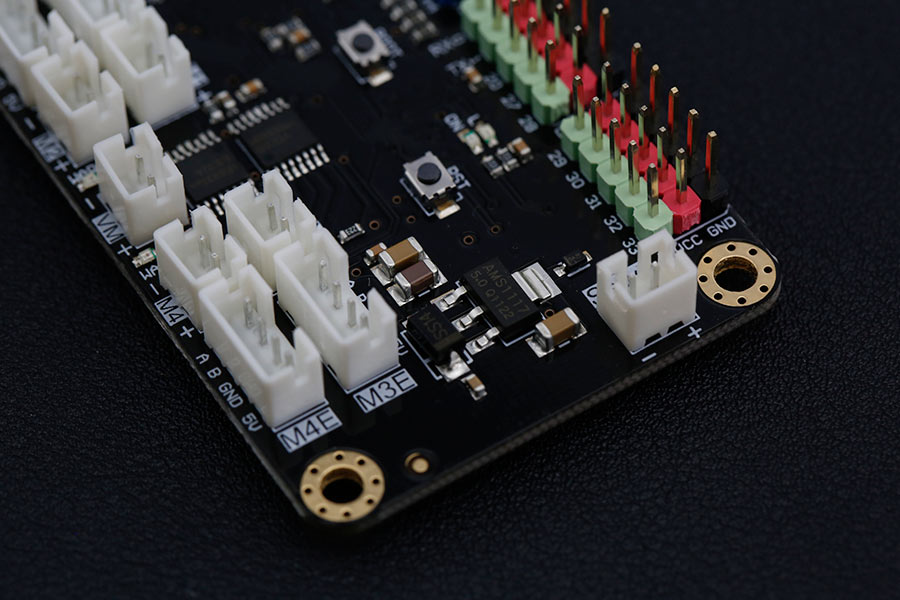
La carte comprend 10 broches numériques et 5 broches d'E / S analogiques indépendantes des broches du moteur. La carte comprend également une série de broches d'interface «Gravity» marquées de différentes couleurs pour différencier facilement les broches d'E / S analogiques et numériques, ainsi que des connexions de puissance et de masse supplémentaires pour les périphériques. L'interface Gravity est colorée comme suit:
Rouge indique la puissance
Noir indique le sol
Le bleu indique la broche d'entrée analogique
Vert indique la broche d'E / S numérique
L'interface Gravity est directement compatible avec les capteurs et modules DFRobot Gravity. Un connecteur jack de servo-barillet externe alimente les appareils de puissance supérieure. Si vous voulez construire votre propre robot, c'est probablement la meilleure carte contrôleur de robot disponible!
Note: La tension de fonctionnement de Romeo BLE Quad est 3.3V, lisez attentivement le wiki Board Overview avant utilisation!
FONCTIONNALITÉS
Prend en charge Arduino IDE / Arduino C
Prise en charge des communications sans fil Bluetooth / Programmation
Prend en charge les applications Android et iOS, code source ouvert, adapté au développement secondaire par l'utilisateur
Prise en charge des commandes AT pour configurer BLE
Firmware évolutif
Support de 4 roues motrices
SPÉCIFICATION
Microcontrôleur: STM32 F103RET6
Vitesse d'horloge: 72 MHZ
Puce Bluetooth: TI CC2540 (Bluetooth 4.0)
Portée de communication: 30m
Tension de fonctionnement: 3.3V
Alimentation DC: USB alimenté ou externe 7V ~ 10V DC
Moteur à courant continu: 4 voies
Prise en charge USB et alimentation externe commutation automatique
Broches d'E / S numériques: 10
Broches d'E / S analogiques: 5
I2C / IWC: 30 (SDA par défaut), 29 (SCL par défaut)
SRAM: 64 k
Flash: 512K (affectation Flash personnalisable, reportez-vous au chapitre Flash pour plus d'informations)
Référentiel de code utilisateur par défaut: 492K
Référentiel de données utilisateur par défaut: 20KA
Port série: 2 (Serial1, Serial3)
Serial1 0 (Rx1) et 1 (Tx1)
Serial3 30 (Rx3) et 29 (Tx3)
Taille: 67 x 42 (mm)
Poids: 54g
DOCUMENTS
LISTE D'EXPÉDITION
Romeo BLE Quad - Une carte de contrôle de robot STM32 x1
JST PH2.0-4Pin câble codeur x4
JST PH2.0-2Fil moteur moteur x4
PH2.0-2Pin vers XH2.54-2Pin câble d'alimentation x2


