

4971-POLOLU, Carte de pilotage pour moteur DC TB67H453FNG
Aperçu
Le TB67H453FNG de Toshiba est un pilote de moteur en pont en H permettant le contrôle bidirectionnel d’un moteur DC brossé entre 4,5 V et 44 V. Il peut fournir environ 1,3 A en continu, avec une limite de courant par défaut de 2 A lorsque 5 V sont appliqués à SLEEP. Cette carte est un support pour le TB67H453FNG ; veuillez consulter la fiche technique du TB67H453FNG pour tous les détails techniques. Tous les composants CMS, y compris le CI, sont pré-soudés.
La carte possède des trous traversants compatibles avec des connecteurs au pas de 0,1″. Les broches ne sont pas incluses mais peuvent être achetées séparément. Des fils peuvent également être soudés directement pour un montage compact.
Caractéristiques
- Pilotage d’un moteur DC bidirectionnel ou de deux moteurs unidirectionnels
- Tension moteur : 4,5 V à 44 V
- Courant de sortie : 1,3 A en continu (limite de 2 A par défaut)
- Tension logique : 1,8 V à 5,5 V
- Mesure de courant intégrée et régulation active du courant
- Deux modes de régulation du courant : cycle par cycle ou temps fixe
- Trois modes de commande :
- Phase/activation (PH/EN)
- PWM (IN/IN)
- Contrôle indépendant des demi-ponts
- Protections intégrées : sous-tension, surintensité, surchauffe
- Protection contre l’inversion de polarité (sur la carte)
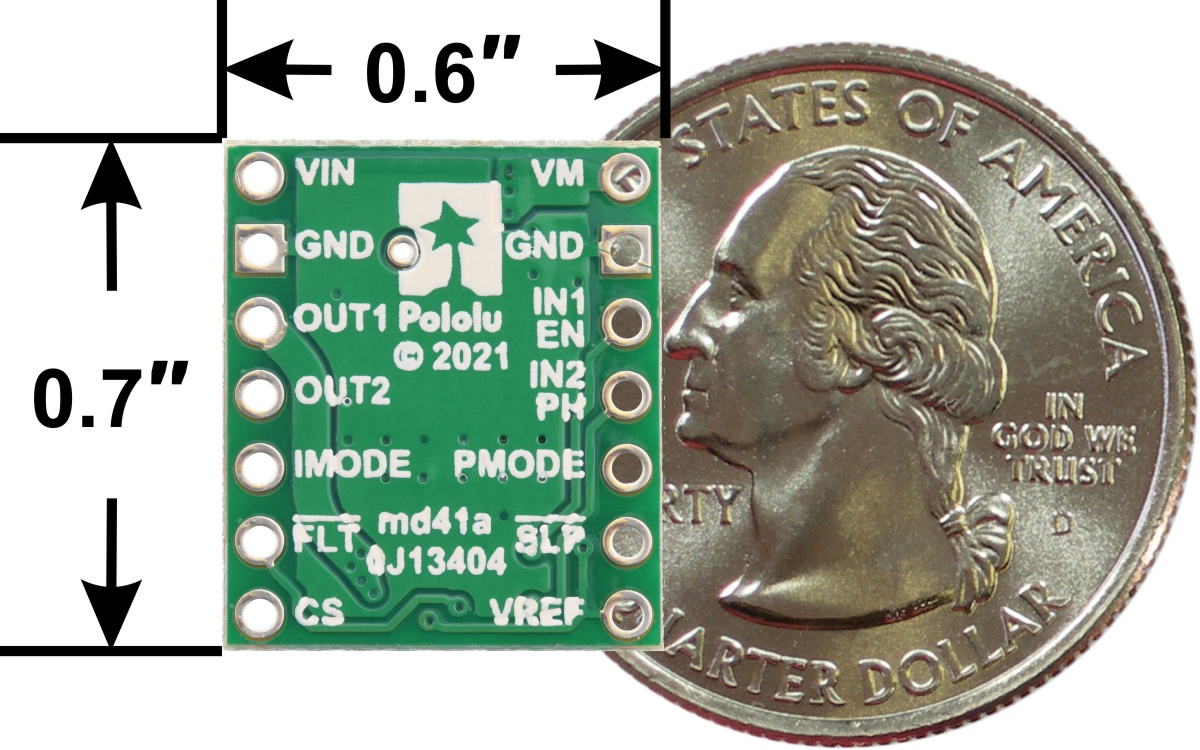
- Format compact : 0,6″ × 0,7″
Utilisation du pilote moteur
Brochage

| PIN | État par défaut | Description |
|---|---|---|
| VIN | – | Entrée d’alimentation de la carte (4,5 V à 44 V). |
| GND | – | Masse pour le moteur et la logique. Le contrôleur et le pilote doivent partager la même masse. |
| VM | – | Sortie tension moteur après protection inverse, utilisable pour alimenter d'autres composants. |
| OUT1 | – | Sortie moteur 1. |
| OUT2 | – | Sortie moteur 2. |
| EN/IN1 | LOW | Entrée moteur 1 (activation en mode PH/EN). |
| PH/IN2 | LOW | Entrée moteur 2 (direction en mode PH/EN). |
| PMODE | FLOATING | Sélection de l’interface de contrôle. Bas = PH/EN, Haut = IN/IN, flottant = demi-pont. État fixé à l’activation de SLEEP. |
| SLEEP | LOW | Met le pilote en veille. Les sorties sont en haute impédance à l’état bas. |
| VREF | – | Tension de référence pour la limitation du courant (dépend de la tension sur SLEEP). |
| IMODE | PULLED LOW | Sélection du mode de régulation du courant. Tiré à la masse via une résistance de 20 kΩ. |
| FAULT | FLOATING | Sortie défaut, drain ouvert, active à l’état bas. Nécessite une résistance de tirage. |
| CS | – | Sortie analogique de mesure de courant (~2,5 V/A). Résistance parallèle ajustable. |
La broche VIN reçoit la tension moteur (4,5–44 V). VM fournit une tension moteur protégée contre les inversions aux autres circuits. La broche SLEEP doit être maintenue à un niveau haut (1,8–5,5 V) pour activer le pilote. La tension sur SLEEP influence VREF, donc la limite de courant.
Mode Phase/Enable (PH/EN)

Mettre PMODE à LOW avant d’activer le pilote. PH définit le sens de rotation, EN reçoit le signal PWM pour contrôler la vitesse (commande type magnitude-signée). Seul le mode moteur/frein est disponible.
| Commande moteur/frein (PMODE = 0) | ||||
|---|---|---|---|---|
| EN | PH | OUT1 | OUT2 | Mode |
| 0 | X | L | L | Frein bas |
| PWM | 1 | PWM (H/L) | L | Avance/frein |
| PWM | 0 | L | PWM (H/L) | Recul/frein |
Ce mode accepte aussi la commande en phase bloquée : fixer EN à HIGH et appliquer un PWM haute fréquence sur PH. Un rapport cyclique de 50 % = arrêt ; 0 % ou 100 % = pleine vitesse en marche arrière ou avant.
Mode PWM (IN/IN)

Mettre PMODE à HIGH avant activation. Permet le mode moteur/flottant et moteur/frein. Les sorties peuvent aussi être mises en haute impédance sans passer en veille.
| Commande PWM (PMODE = 1) | ||||
|---|---|---|---|---|
| IN1 | IN2 | OUT1 | OUT2 | Mode |
| 0 | 0 | Z | Z | Libre |
| PWM | 0 | PWM (H/Z) | PWM (L/Z) | Avance/libre |
| 0 | PWM | PWM (L/Z) | PWM (H/Z) | Recul/libre |
| PWM | 1 | L | PWM inversé | Recul/frein |
| 1 | PWM | PWM inversé | L | Avance/frein |
| 1 | 1 | L | L | Frein bas |
Mode demi-pont indépendant
Laisser PMODE flottant au moment de l’activation. Voir la fiche technique du TB67H453 pour plus de détails sur ce mode.
Mesure de courant
La broche CS fournit une tension analogique (~2,5 V/A) proportionnelle au courant moteur traversant les MOSFETs côté masse. Résistance de mesure = 2,49 kΩ. Ajouter une résistance en parallèle réduit la sensibilité.
Limitation du courant
Le pilote prend en charge la limitation active du courant par hachage. Le mode par défaut est cycle par cycle (IMODE tiré à la masse). La limite = VREF ÷ sensibilité CS. Avec SLEEP = 5 V, courant max ≈ 2 A. Pour réduire le courant, abaisser VREF ou ajuster CS. Connecter CS à GND désactive la régulation active (protection toujours active à ~3,5 A).
Schéma



