


MP6500 Transporteur de conducteur de moteur pas à pas, contrôle de courant de potentiomètre
Cette carte de dérivation pour le pilote de moteur pas à pas bipolaire MPS MP6500 est le dernier pilote de moteur pas-à-pas de Pololu. Le module a un brochage et une interface qui sont très similaires à ceux de nos populaires porteuses A4988, de sorte qu'il peut être utilisé comme un remplacement de ces cartes dans de nombreuses applications. Le MP6500 offre un micropas jusqu'à 1/8 de phase, fonctionne de 4,5 V à 35 V et peut fournir jusqu'à 1,5 A par phase en continu sans radiateur ni flux d'air forcé (jusqu'à 2,5 A de crête). Cette version de la carte utilise un potentiomètre de réglage intégré pour régler la limite de courant, et la carte est livrée avec des broches mâles de 0,1 "incluses mais non soudées.
Aperçu
Ce produit est une carte de support ou une carte de dérivation pour le pilote de moteur pas à pas MP6500 de Monolithic Power Systems (MPS); Nous recommandons donc une lecture attentive de la fiche technique du MP6500 (1MB pdf) avant d'utiliser ce produit. Ce moteur pas à pas vous permet de commander un moteur pas à pas bipolaire jusqu'à environ 1,5 A par phase en continu sans radiateur ni flux d'air forcé.
.jpg?1525877450954)
Détails pour l'article # 2966
Cette version du support de moteur pas à pas MP6500 utilise un potentiomètre de trim intégré pour régler la limite de courant.
Matériel inclus
Le support d'entraînement du moteur pas à pas MP6500 est livré avec un embase mâle de 1 "16 broches. Les collecteurs peuvent être soudés pour être utilisés avec des plaques d'essais sans soudure ou des connecteurs femelles de 0,1 ". Vous pouvez également souder vos fils de moteur et d'autres connexions directement à la carte.
.jpg?1525877635699)
Connexions d'alimentation
Le pilote nécessite une tension d'alimentation du moteur de 4,5 V à 35 V à connecter entre VMOT et GND. Cette alimentation doit avoir des condensateurs de découplage appropriés à proximité de la carte, et elle doit être capable de délivrer le courant de moteur pas à pas attendu. Le pilote dispose d'un régulateur de tension interne, il ne nécessite donc pas d'alimentation en tension logique.
Avertissement: Cette carte support utilise des condensateurs céramiques à faible ESR, ce qui la rend vulnérable aux pointes de tension LC destructrices, en particulier lors de l'utilisation de câbles d'alimentation de plus de quelques pouces. Dans de bonnes conditions, ces pointes peuvent dépasser la tension maximale absolue de 40 V pour le MP6500 et endommager la carte de façon permanente, même lorsque la tension d'alimentation du moteur est aussi faible que 12 V. Une façon de protéger le conducteur contre de tels pics est de mettre un gros condensateur électrolytique (d'au moins 47 μF) à travers la puissance du moteur (VMOT) et mis à la terre quelque part près de la carte.
Connexions moteur
Les moteurs pas à pas à quatre, six et huit fils peuvent être entraînés par le MP6500 s'ils sont correctement connectés; une réponse FAQ explique les câblages appropriés en détail.
Avertissement: Connecter ou déconnecter un moteur pas à pas alors que le moteur est sous tension peut détruire le conducteur. (Plus généralement, recâbler quoi que ce soit pendant qu'il est alimenté demande des ennuis.)
Étape (et microstep) taille
Les moteurs pas à pas ont typiquement une spécification de taille de pas (par exemple 1,8 ° ou 200 pas par révolution), qui s'applique aux étapes complètes. Un pilote micropas tel que le MP6500 permet des résolutions plus élevées en permettant des emplacements de pas intermédiaires, qui sont obtenus en alimentant les bobines avec des niveaux de courant intermédiaires. Par exemple, la conduite d'un moteur en mode quart de pas donnera au moteur de 200 pas par tour 800 micropas par tour en utilisant quatre niveaux de courant différents.
Les entrées de sélecteur de résolution (taille de pas) (MS1 et MS2) permettent la sélection parmi les quatre résolutions de pas selon le tableau ci-dessous. Ces deux broches sont tirées vers le bas à travers des résistances internes de 500 kΩ, de sorte que le conducteur passe par défaut au mode plein-pas quand ces entrées sont déconnectées. Pour que les modes micropas fonctionnent correctement, la limite de courant doit être réglée assez bas (voir ci-dessous) pour que la limitation de courant soit activée. Sinon, les niveaux de courant intermédiaires ne seront pas maintenus correctement et le moteur sautera les micropas.
| MS1 | MS2 | Microstep Resolution |
|---|---|---|
| Low | Low | Full step |
| High | Low | Half (1/2) step |
| Low | High | Quarter (1/4) step |
| High | High | Eighth (1/8) step |
Entrées de contrôle
Chaque impulsion vers l'entrée STEP correspond à un micropas du moteur pas à pas dans la direction sélectionnée par la broche DIR. Ces entrées sont toutes les deux réduites par défaut grâce à des résistances internes de 500 kΩ. Si vous voulez simplement une rotation dans une seule direction, vous pouvez laisser DIR déconnecté.
La puce a deux entrées différentes pour contrôler ses états de puissance: SLEEP et ENBL. Pour plus de détails sur ces états d'alimentation, consultez la fiche technique. Veuillez noter que le conducteur tire ces deux broches à travers les résistances internes de 500 kΩ. L'état SLEEP par défaut empêche le pilote de fonctionner; cette broche doit être haute pour activer le driver (elle peut être connectée directement à une tension "haute" logique entre 2,5 V et 5 V, ou elle peut être dynamiquement commandée en la connectant à une sortie numérique d'un MCU). L'état par défaut de la broche ENBL est d'activer le pilote, donc cette broche peut être laissée déconnectée.
Le MP6500 dispose également d'une sortie FAULT à drain ouvert qui est faible lorsque les FET à pont en H sont désactivés suite à une protection contre les surintensités, une protection contre les surtensions, un arrêt thermique ou une protection contre les sous-tensions. La carte support connecte cette broche à la broche SLEEP par l'intermédiaire d'une résistance de 10 kΩ qui agit comme un FAULTpull-up lorsque le SLEEP est maintenu à l'extérieur, donc aucune traction externe n'est nécessaire sur la broche FAULT. Notez que le support inclut une résistance de protection de 1,5 kΩ en série avec la broche FAULT qui permet de connecter cette broche directement à une alimentation en tension logique, comme cela peut arriver si vous utilisez cette carte dans un système conçu pour la broche compatible A4988 transporteur. Dans un tel système, la résistance de 10 kΩ entre SLEEP et FAULT agirait alors comme un pull-up pour SLEEP, rendant le porteur MP6500 plus d'un remplacement direct pour l'A4988 dans de tels systèmes (l'A4988 a un pull-up interne sur son Touche SLEEP).
En raison de la connexion entre SLEEP et FAULT, les défauts actifs peuvent tirer la broche SLEEP vers le bas (en dessous de 2.1 V) si elle n'est pas suffisamment tirée vers l'extérieur. Nous recommandons d'utiliser une résistance pull-up avec SLEEP de 4,7 kΩ ou plus forte (ou de connecter directement le SLEEP au VCC).
.jpg?1525877817643)
Limitation du courant
Pour atteindre des cadences élevées, l'alimentation du moteur est typiquement supérieure à ce qui serait admissible sans limitation de courant active. Par exemple, un moteur pas à pas typique pourrait avoir un courant nominal maximal de 1 A avec une résistance de bobine de 5 Ω, ce qui indiquerait une alimentation maximale de 5 V. L'utilisation d'un tel moteur avec 9 V permettrait des cadences plus élevées. doit être activement limité à moins de 1 A pour éviter d'endommager le moteur.
Le MP6500 prend en charge cette limitation de courant active, et le potentiomètre de trimmer sur la carte peut être utilisé pour définir la limite de courant:
.jpg?1525877980554)
Vous voudrez généralement régler la limite de courant du conducteur pour qu'elle soit égale ou inférieure à la valeur nominale actuelle de votre moteur pas à pas. Une façon de régler la limite de courant est de mettre le pilote en mode plein-pas et de mesurer le courant qui passe à travers une seule bobine de moteur sans cadencer l'entrée STEP. Le courant mesuré sera 0,7 fois la limite de courant (puisque les deux bobines sont toujours allumées et limitées à environ 70% du réglage de limite de courant en mode plein-pas).
Une autre façon de régler la limite de courant consiste à mesurer la tension VREF et à calculer la limite de courant résultante. La tension VREF est accessible sur un via encerclé sur la sérigraphie inférieure de la carte de circuit imprimé. La limite actuelle concerne VREF comme suit:
limite de courant = VREF × 3.5 AV limite de courant = VREF × 3.5 AV
Ainsi, la limite de courant dans les ampères (A) est égale à 3,5 fois la tension VREF en volts (V), et si vous avez un moteur pas à pas de 1 A, par exemple, vous pouvez régler la limite de courant à environ 1 A réglage de la tension de référence à environ 0,28 V. Dans la pratique, nous avons souvent observé que la limite de courant réelle était d'environ 10% (parfois jusqu'à 15%) inférieure à ce que l'équation et le graphique montrent.
Les broches I1 et I2 ne sont pas utilisées sur cette version du support de moteur pas à pas MP6500, et les signaux appliqués à ces broches n'auront aucun effet sur le fonctionnement du pilote.
Remarque: Le courant de la bobine peut être très différent du courant d'alimentation, vous ne devez donc pas utiliser le courant mesuré sur l'alimentation pour régler la limite de courant. L'endroit approprié pour mettre votre compteur actuel est en série avec l'un de vos bobines de moteur pas à pas. Si le conducteur est en mode plein-pas, les deux bobines seront toujours allumées et limitées à environ 70% du réglage de limite de courant. Si votre conducteur est dans l'un des modes micropas, le courant traversant les bobines changera à chaque pas, allant de 0% à 100% de la limite définie. Voir la fiche technique MP6500 pour plus d'informations.
Considérations sur la dissipation de puissance
Le circuit d'attaque du MP6500 a un courant nominal maximum de 2,5 A par bobine, mais le courant réel que vous pouvez fournir dépend de la capacité à maintenir le circuit intégré au frais. La carte de circuit imprimé du transporteur est conçue pour extraire la chaleur du CI, mais pour fournir plus d'environ 1,5 A par bobine, un dissipateur de chaleur ou une autre méthode de refroidissement est nécessaire. Notez que la version de cette carte avec contrôle de courant numérique a une limite de courant maximale d'environ 2 A.
Ce produit peut devenir assez chaud pour vous brûler longtemps avant que la puce ne surchauffe. Soyez prudent lorsque vous manipulez ce produit et d'autres composants qui y sont connectés.
Veuillez noter que la mesure du courant consommé par l'alimentation ne fournira généralement pas une mesure précise du courant de la bobine. Comme la tension d'entrée du driver peut être significativement supérieure à la tension de la bobine, le courant mesuré sur l'alimentation peut être un peu plus faible que le courant de la bobine (le driver et la bobine agissent essentiellement comme une alimentation à découpage). En outre, si la tension d'alimentation est très élevée par rapport à ce dont le moteur a besoin pour atteindre le courant réglé, le cycle de service sera très faible, ce qui conduit également à des différences significatives entre les courants moyens et efficaces. De plus, veuillez noter que le courant de bobine est une fonction de la limite de courant réglée, mais il n'est pas nécessairement égal au réglage de limite de courant puisque le courant réel à travers chaque bobine change avec chaque micropas.
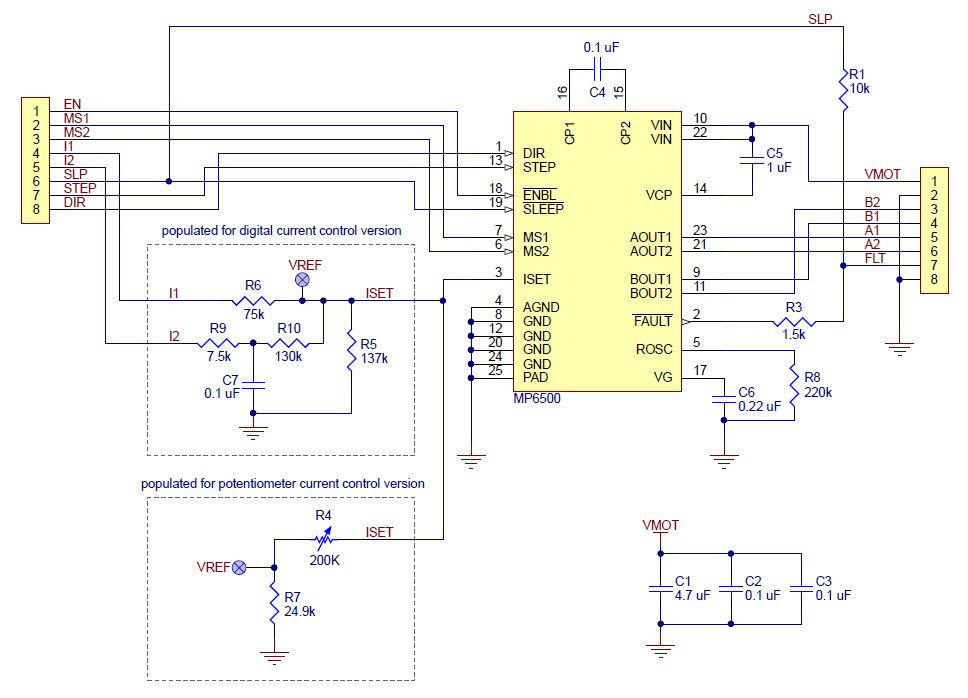
Diagramme schématique
.jpg?1525878150979)
Ce schéma est également disponible en format pdf téléchargeable (pdf 93k).
Voir la page produit de Pololu pour des informations détaillées.


