





3081-POLOLU Kit paire encodeur magnétique pour micro Motoréducteurs métallique, 12 CPR, 2.7-18V (HPCB compatible)
Ajouter encodeurs en quadrature à vos micro motoréducteurs métalliques (version étendue arrière de l'arbre nécessaire) avec ce kit qui utilise un capteur magnétique à disque et effet Hall pour fournir 12 points par tour de l'arbre du moteur. Les capteurs fonctionnent à partir de 2,7 V à 18 V et fournissent des sorties numériques qui peuvent être connectés directement à un micro-contrôleur ou un autre circuit numérique. Ce module est compatible avec tous les motoréducteurs micro métalliques à double arbre que nous portons, y compris les versions de HPCB.
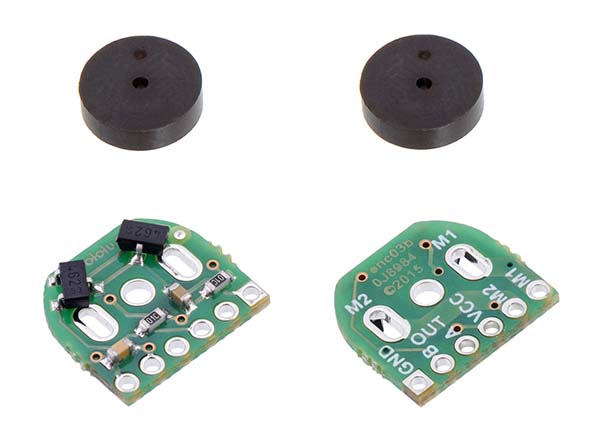
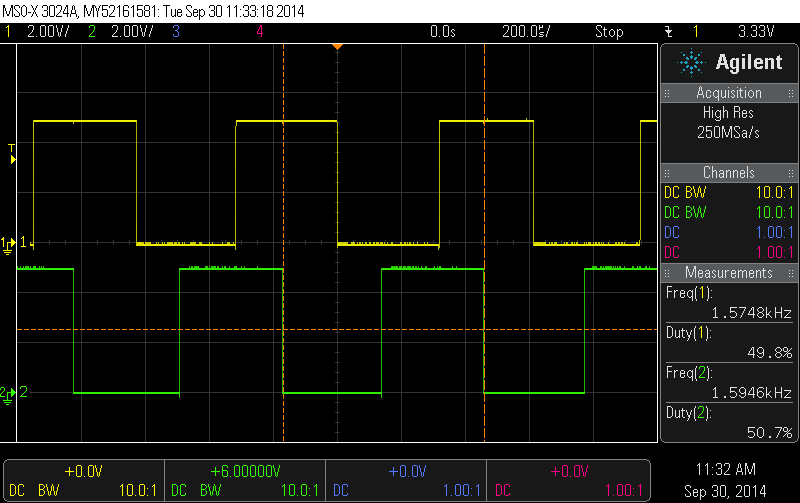
Ce kit comprend deux dual-channel Effet Hall cartes de capteurs et deux disques magnétiques 6 pôles qui peuvent être utilisés pour ajouter un codage en quadrature à deux motoréducteurs métalliques micro avec des arbres étendus arrière (moteurs ne sont pas inclus dans ce kit). La carte de codeur détecte la rotation du disque magnétique et fournit une résolution de 12 points par tour de l'arbre du moteur en comptant les deux bords des deux canaux. Pour calculer les points par tour de l'arbre de sortie de boîte de vitesses, il faut multiplier le rapport d'engrenage de 12.
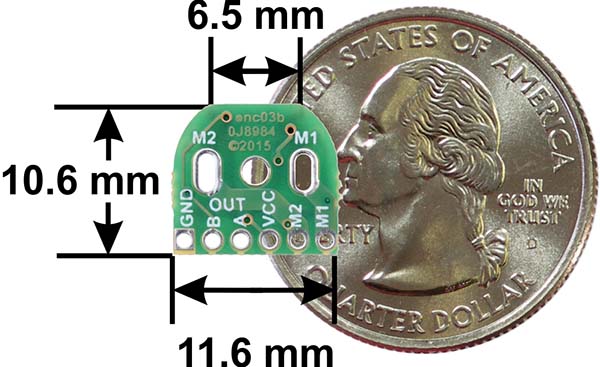
Cette solution d'encodeur compact inscrit dans la section 12 mm x 10 mm des moteurs sur trois des quatre côtés, et il ne se prolonge 0,6 mm au-delà du bord du quatrième côté (note: si vous avez besoin pour être aligné avec ce dernier côté, vous pouvez soigneusement moudre la planche un peu et soudure pour les demi-trous restants). L'assemblage ne se prolonge pas au-delà du bout de l'arbre prolongé du moteur, qui fait saillie au-delà de 5 mm de la coiffe d'extrémité en matière plastique à l'arrière du moteur.
Remarque: Ce système de capteur est destiné aux utilisateurs à l'aise avec l'installation de l'encodeur physique. Il fonctionne uniquement avec des micro motoréducteurs métalliques qui ont étendu dos arbres.
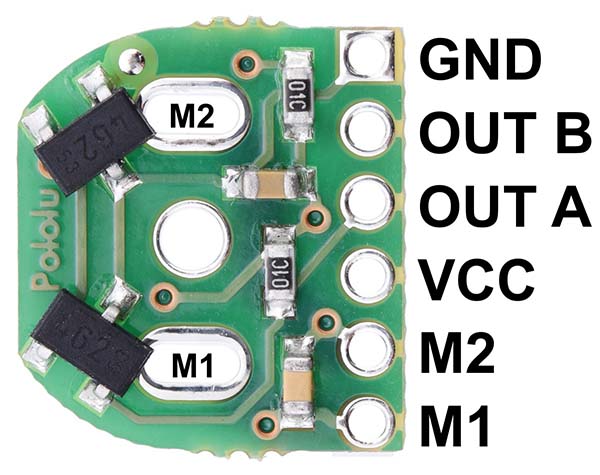
Brochage et l'installation
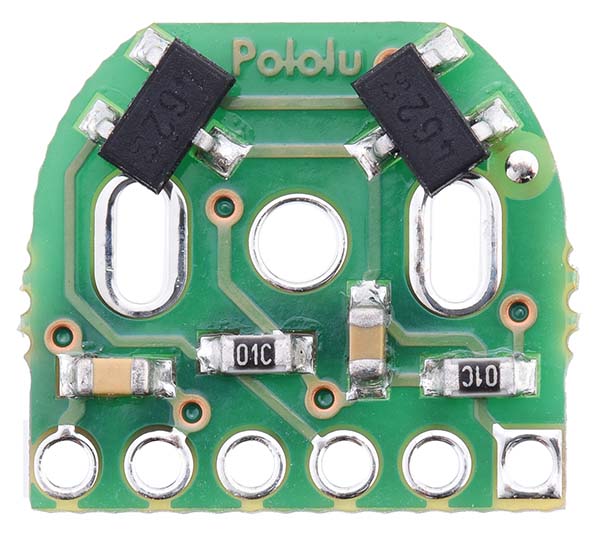
La plaque de codeur est conçu pour être soudé directement à l'arrière du moteur, l'arbre arrière du moteur faisant saillie à travers le trou au milieu de la carte de circuit imprimé. Une façon d'atteindre un bon alignement entre le conseil et le moteur est de virer de bord sur le bord d'une broche de moteur et de souder l'autre broche que lorsque la carte est plat et bien aligné. Soyez prudent pour éviter un chauffage prolongé des broches à moteur, ce qui pourrait déformer le capuchon en plastique du moteur ou les balais du moteur. Une fois que le conseil d'administration est soudé vers le bas sur les deux bornes, les fils du moteur sont connectés aux plots M1 et M2 le long du bord de la carte; les quatre tampons restants sont utilisés pour alimenter les capteurs et accéder aux deux sorties en quadrature.
Les capteurs sont alimentés par les broches VCC et GND. CCV peut être de 2,7 V à 18 V, et les sorties en quadrature A et B sont des signaux numériques qui sont soit entraînés bas (0 V) par les capteurs ou tirés à VCC à 10 kQ pull-up résistances, en fonction du champ magnétique appliqué. Les comparateurs de capteurs ont intégré hystérésis, ce qui empêche les signaux parasites dans les cas où l'arrêt du moteur à proximité d'un point de transition.
six tampons de la société ont un pas de 2 mm, de sorte qu'ils ne fonctionnent pas avec communs 0,1 "connecteurs. Une option pour la connexion à la carte est de souder des fils individuels.
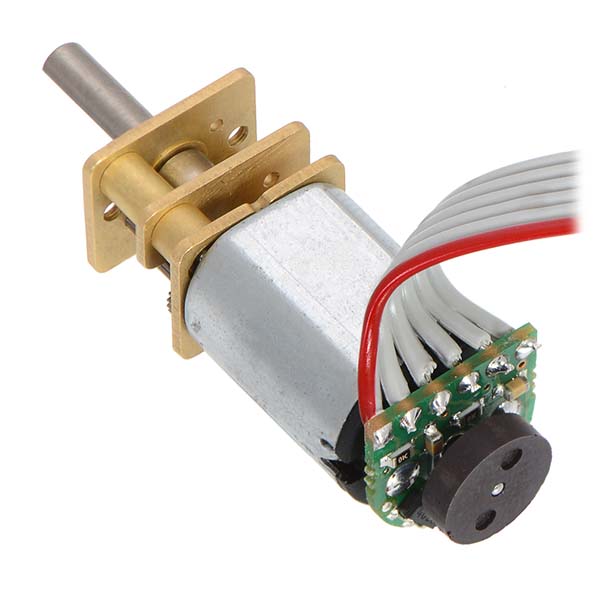
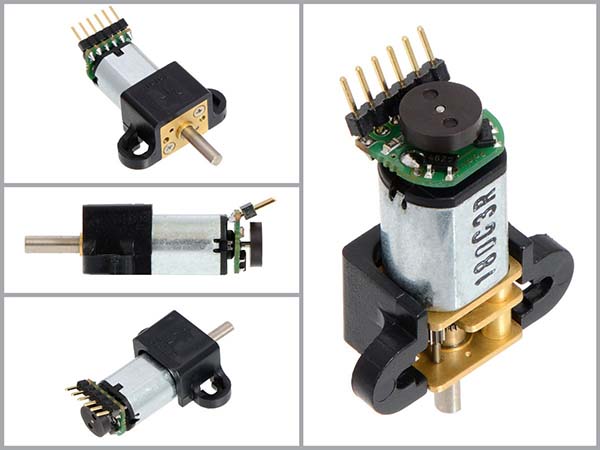
Alternativement, vous pouvez souder un connecteur 2mm à pas à la carte. Les exemples ci-dessous montrent une tête mâle, ce qui vous donne la possibilité de faire un câble détachable terminé par un 2mm-pitch tête femelle 6 broches. Si les broches sont inclinées sur le moteur, comme le montre l'image ci-dessous, ils vont tout simplement dépasser à peine à travers les trous de la carte. Notez que dans cette orientation, il y a place pour brancher un connecteur femelle même lorsque ourextended support de motoréducteur micro métallique est utilisé.
Si les broches ne pointent pas dans le moteur, ils devront être incliné de sorte qu'ils le disque magnétique suffisamment claire. Avec un fer à souder convenable, il est possible de les souder dans cette orientation, même après que le capteur a été installé sur le moteur.
Une fois que la plaque est soudée sur le moteur, le disque codeur magnétique peut être enfilée sur l'arbre du moteur. Un moyen facile d'y parvenir est d'appuyer sur le moteur sur le disque pendant qu'il est assis sur une surface plane, pousser jusqu'à ce que l'arbre est en contact avec cette surface. La taille de l'espace entre le disque de codeur et la carte du capteur n'a pas un grand impact sur les performances aussi longtemps que l'arbre du moteur est au moins tout au long du disque.
Ce schéma est également disponible en format pdf téléchargeable (125k pdf).
Comparaison à la version précédente
Cette version de l'encodeur est une modification mineure à la version précédente qui agrandit simplement les trous des bornes du moteur afin qu'ils puissent accueillir les plus grands terminaux sur les versions HPCB de nos micro motoréducteurs métalliques. Les deux versions de l'encodeur sont par ailleurs identiques, et ce nouveau peuvent servir de remplacement drop-in pour le précédent.
Dimensions
| Size: | 10.6 mm × 11.6 mm1 |
|---|---|
| Weight: | 1.0 g2 |
Spécifications générales
| Minimum operating voltage: | 2.7 V |
|---|---|
| Maximum operating voltage: | 18 V |
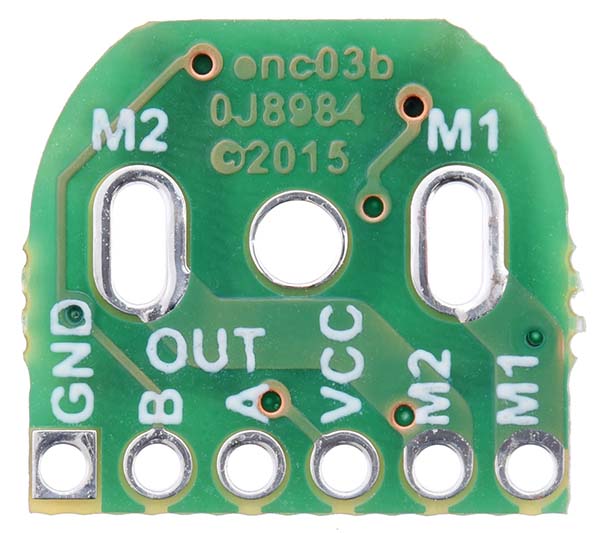
Identification des marques
| PCB dev codes: | enc03b |
|---|---|
| Other PCB markings: | 0J8984 |
Notes:
- 1 Le codeur assemblé étendra 5 mm au-delà du capuchon d'extrémité de moteur en plastique (elle correspond entièrement à l'intérieur de la longueur de l'arbre prolongé du moteur).
2 Poids de l'ensemble complet. Chaque carte codeur pèse ~ 0,2 g et chaque disque magnétique pèse ~ 0,3 g.
|
Part#
|
Product
|
Size
|
Weight (g)
|
Minimum operating voltage (V)
|
Maximum operating voltage (V)
|
Voltage (V)
|
Average input current (mA)
|
PCB dev codes
|
Other PCB markings
|
|---|---|---|---|---|---|---|---|---|---|
| 1523-POLOLU | Magnetic Encoder Pair Kit for Mini Plastic Gearmotors, 12 CPR, 2.7-18V | 20 mm × 16.5 mm1 | 2.42 | 2.7 | 18 | enc04a | 0J9719 | ||
| 3081-POLOLU | Magnetic Encoder Pair Kit for Micro Metal Gearmotors, 12 CPR, 2.7-18V (HPCB compatible) | 10.6 mm × 11.6 mm3 | 1.04 | 2.7 | 18 | enc03b | 0J8984 | ||
| 2599-POLOLU | Magnetic Encoder Disc for Micro Metal Gearmotors, 12 CPR (Bulk) | 7.65 mm diameter × 2 mm thick | 0.3 | ||||||
| 2591-POLOLU | Optical Encoder Pair Kit for Micro Metal Gearmotors, 3.3V | 9.6 mm × 11.6 mm | 0.75 | 3.3 | 24 | ||||
| 2590-POLOLU | Optical Encoder Pair Kit for Micro Metal Gearmotors, 5V | 9.6 mm × 11.6 mm | 0.75 | 5 | 12 | ||||
| 1218-POLOLU | Pololu 42×19mm Wheel and Encoder Set | ||||||||
| 1217-POLOLU | Encoder for Pololu Wheel 42x19mm |
Notes:
- 1. Le codeur assemblé étendra 4,25 mm au-delà de l'arrière du moteur (elle correspond entièrement à l'intérieur de la longueur de l'arbre prolongé du moteur).
2. Poids de l'ensemble complet. Chaque carte codeur pèse environ 0,6 g et chaque disque magnétique pèse environ 0,6 g.
3. Le codeur assemblé étendra 5 mm au-delà de l'embout du moteur en plastique (elle correspond entièrement à l'intérieur de la longueur de l'arbre prolongé du moteur).
4. Poids de l'ensemble complet. Chaque carte codeur pèse ~ 0,2 g et chaque disque magnétique pèse ~ 0,3 g.
5. Poids de l'ensemble complet. Chaque carte codeur pèse ~ 0,2 g et chaque roue codeuse est inférieure à 0,1 g.


