

Module ultrasonique Imperméable JSN-SR04T-3.0 Capteur transducteur de mesure de distance, pour Arduino Trousse électronique de bricolage.
La nouvelle version SR04T-3.0 résout le problème des sauts de données aveugles et améliore la stabilité du produit. Le module de télémétrie ultrasonique JSN-SR0T4-3.0 peut fournir une fonction de détection de distance sans contact de 21 cm à 600 cm, la précision de la télémétrie peut atteindre 3 mm ; le module se compose d'un capteur ultrasonique et d'un circuit de contrôle intégré avec un émetteur-récepteur. L'utilisation du mode un est compatible avec notre module HC-SR04.
Caractéristiques :
1. Petite taille et facile à utiliser :
2. Faible tension et faible consommation d'énergie :
3. Grande précision de mesure ;
4. Excellente protection contre les interférences ;
5. Sonde étanche fermée intégrée avec fil, adaptée aux situations de mesure humides et difficiles.
Paramètres du produit :
Tension de fonctionnement : DC : 3.0V-5.5V
Courant de travail : moins de 8mA
Fréquence de la sonde : 40kHz
Portée plus longue : 600cm
Portée plus courte : 20cm
Précision de la longue portée : ±1cm
Résolution : 1mm
Angle de mesure : 75 degrés
Signal de déclenchement à l'entrée :
1. Impulsion TTL supérieure à 10uS ;
2. Commande d'envoi du port série 0X55
Signal d'écho de sortie Signal de niveau de largeur d'impulsion de sortie, ou TTL
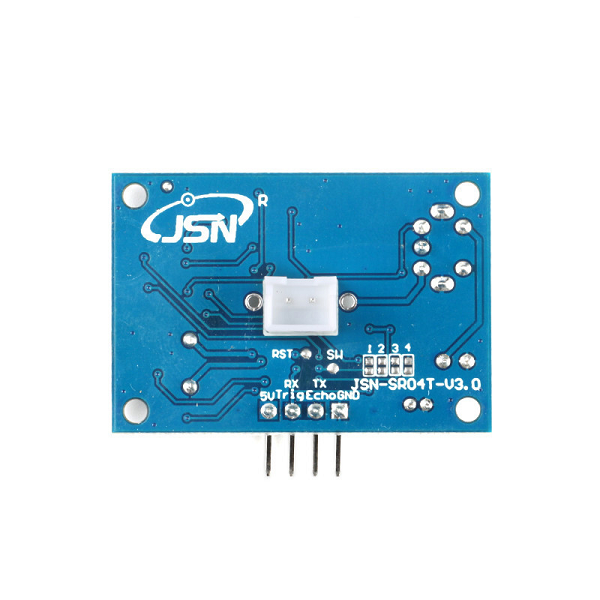
Câblage :
3-5. 5V (alimentation +)
Trig (contrôle) RX
Echo (sortie) TX
GND (alimentation-)
Température de fonctionnement : -20-+70 degrés
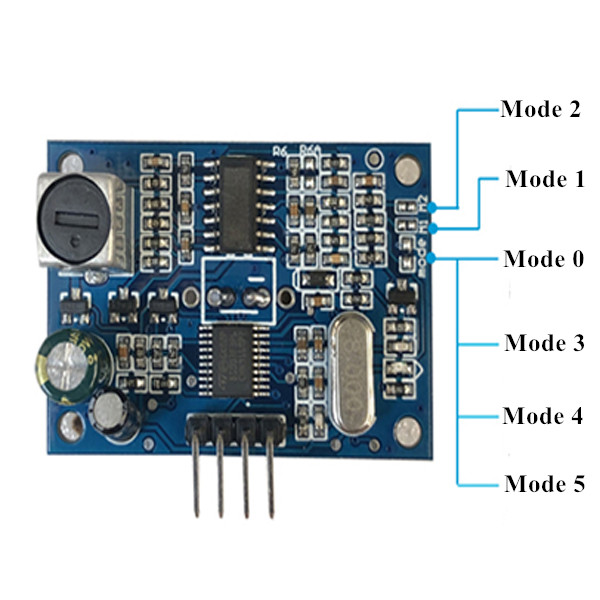
Description des fonctions : 6 modes.
Mode 2 : la connexion courte M2 est une sortie contrôlée par le port série.
Mode 1 : la connexion courte de M1 est une sortie série automatique.
Mode 0 : Mode flottant = sortie de largeur d'impulsion de déclenchement (mode par défaut)
Mode 3 : Mode welding 200K = sortie automatique de largeur d'impulsion de distance
Mode 4 : Mode welding 360K = sortie en mode largeur d'impulsion à faible puissance
Mode 5 : Mode welding 470K = sortie en mode commutation
Mode 0 : Mode=sortie de largeur d'impulsion flottante de haut niveau (PWM)
1) Définition des broches
Trig : contrôle du déclenchement
Echo : sortie de largeur d'impulsion de niveau élevé
1. Principe de fonctionnement de base : (1) Utiliser le port IO TRIG pour déclencher la télémétrie et fournir un signal de haut niveau d'au moins 10us.
(2) Le module envoie automatiquement 8 ondes carrées de 40khz et détecte automatiquement s'il y a un retour de signal ;
(3) En cas de retour du signal, le module émet un niveau élevé via le port IO ECHO, et la durée du niveau élevé correspond au temps écoulé entre le lancement de l'onde ultrasonique et le retour du signal.
Distance d'essai à température ambiante = (durée du niveau élevé * vitesse du son (348M/S))/2 ;
(4) Une fois que le module est déclenché pour mesurer la distance, si aucun écho n'est reçu (la raison est au-delà de la plage mesurée ou la sonde n'est pas en face de l'objet mesuré), le port ECHO passera automatiquement au niveau bas après 40MS, marquant ce temps. La mesure est terminée, qu'elle soit réussie ou non.
(5) La LED est allumée à la fin de la mesure lorsque l'appareil est mis sous tension, et uniquement lorsque le signal de déclenchement est envoyé à la broche TRIG. La fréquence de clignotement de la LED est synchronisée avec la période de déclenchement, indiquant que le module a reçu la commande correcte pour entrer dans l'état de fonctionnement.

Mode 1 : Mode= ouvert signifie qu'il n'y a pas de soudure. Le mode est expliqué comme suit
Principe de fonctionnement de base :
(1) Adopter le port d'E/S TRIG pour déclencher la télémétrie. Présenter un signal de haut niveau pendant au moins 10 secondes.
(2) Le module envoie automatiquement huit ondes carrées de 40khz et détecte automatiquement si un signal revient ;
(3) Lorsqu'un signal revient, un niveau élevé est émis par le port d'E/S ECH0. La durée du niveau haut est le temps écoulé entre la transmission de l'onde ultrasonique et le retour du signal. Hauteur de la distance de test = (durée du niveau haut * vitesse du son (348M/S))/2.
(4) Après que le module ait été déclenché pour la mesure, si l'écho ne peut pas être reçu (la raison dépasse la portée mesurée ou la sonde ne fait pas face à l'objet mesuré), le port ECHO deviendra automatiquement bas après 40MS, marquant ce temps La mesure se termine, indépendamment de la réussite.
Mode 2 : Mode=47K (ou court-circuiter directement le bit M1) Sortie automatique UART
Le mode de sortie automatique UART émet la valeur de la distance mesurée (nombre hexadécimal) conformément au format de communication UART. Ce mode ne nécessite pas de signal de déclenchement externe. Le module peut mesurer automatiquement toutes les 100 ms. La broche TX émet la valeur de la distance mesurée après chaque mesure.Mode 3 : Mode=120K (ou court-circuiter directement le bit M2) Sortie contrôlée par UART
La méthode de sortie contrôlée par UART émet la valeur de la distance mesurée (nombre hexadécimal) conformément au format de communication UART. Dans cette méthode, le signal de commande de déclenchement oX55 doit être ajouté à la broche RX. Le module mesure une fois chaque fois que la commande est reçue. Le pied délivre la valeur de la distance mesurée. Le cycle de déclenchement de la commande doit être supérieur à 60 ms.
Mode 3 : Mode=120K (ou court-circuiter directement le bit M2) Sortie contrôlée par UART
La méthode de sortie contrôlée par UART émet la valeur de la distance mesurée (nombre hexadécimal) conformément au format de communication UART. Dans cette méthode, le signal de commande de déclenchement oX55 doit être ajouté à la broche RX. Le module mesure une fois chaque fois que la commande est reçue. Le pied délivre la valeur de la distance mesurée. Le cycle de déclenchement de la commande doit être supérieur à 60 ms.
Mode 4 : Mode=200K haut niveau (PWM) sortie automatique de largeur d'impulsion
Dans le cadre de la sortie automatique largeur d'impulsion PWM, le module mesure automatiquement à une période de 200 ms et émet une largeur d'impulsion de haut niveau correspondant à la distance après la mesure. Mode de calcul de la distance mode de référence 1.
Mode 5 : Mode=360K faible consommation d'énergie (PWM) niveau haut de la largeur d'impulsion sortie contrôlée
En mode basse consommation, le chien d'arrêt du module est désactivé. Ce module convient aux utilisateurs alimentés par batterie. La consommation statique est inférieure à 70UA. La méthode de mesure de la distance de travail est la même qu'en mode 1.
Mode 6 : Mode=470K sortie de commutation
Le module définit une valeur de seuil en usine, la valeur par défaut étant de 1,5 mètre. Le module effectue une télémétrie toutes les 200 ms. Lorsque la distance détectée de la cible est inférieure au seuil fixé, la broche Echo émet un niveau élevé. Lorsque la valeur de la distance détectée est supérieure au seuil fixé, la broche Echo émet une faible puissance. Afin d'améliorer la stabilité, la valeur par défaut en usine est que la distance détectée par la cible pendant deux fois consécutives est inférieure au seuil fixé. Signal, pas de capacité de pilotage. Les relais de commande à transistor doivent être ajoutés lors de l'application.


