

Double MAX14870 Pilote de moteur pour Raspberry Pi (Kit partiel)
Cette carte d'extension compacte se branche directement dans l'en-tête GPIO d'un Raspberry Pi et constitue une solution simple et économique pour l'entraînement d'une paire de petits moteurs CC brossés. Sa paire de drivers de moteur MAX14870 intégrés lui permet de fonctionner de 4,5 V à 36 V, ce qui en fait une excellente option de contrôle pour les petits moteurs fonctionnant sur une large gamme de tensions. La carte peut délivrer un courant continu de 1,7 A (2,5 A crête) par moteur. Cette version est livrée en kit partiel. tous les composants à montage en surface sont installés, mais les connecteurs à trou traversant inclus ne sont pas soudés.
.jpg?1524842932596)
Double Driver Moteur MAX14870 pour Raspberry Pi, vue de dessus avec les dimensions.
Cette carte d'extension de pilote de moteur et sa bibliothèque Python correspondante facilitent le contrôle d'une paire de moteurs CC bidirectionnels brossés avec un Raspberry Pi compatible (modèle B + ou plus récent), y compris le Pi 3 Model B et le Model A +. La carte d'extension est équipée de deux circuits d'attaque de moteur MAX14870 à pont en H de Maxim, qui lui permettent de fonctionner de 4,5 V à 36 V et conviennent parfaitement à la conduite de petits moteurs sur une large plage de tensions. La carte peut délivrer un débit continu de 1,7 A par canal et tolérer des courants de crête jusqu'à 2,5 A par canal pendant quelques secondes.
La configuration par défaut de la carte utilise cinq broches GPIO pour contrôler les pilotes du moteur, en utilisant les sorties PWM matérielles du Raspberry Pi, et utilise une broche supplémentaire pour lire une sortie de défaut des pilotes. Toutefois, les mappages de broches peuvent être personnalisés si les valeurs par défaut ne conviennent pas.
.jpg?1524842944004)
Pour contrôler les moteurs de plus forte puissance avec un Raspberry Pi, pensez à notre double module d'extension de moteur MC33926 (2755-POLOLU) et, pour les moteurs à basse tension, notre kit d'entraînement double moteur DRV8835 (2753-POLOLU).
Caractéristiques
- Deux conducteurs de moteur à pont H à canal unique avec protection anti-retour et diodes de roue libre internes (chacun peut entraîner un moteur à courant continu)
- Tension d'alimentation du moteur: 4,5 V à 36 V
- Courant de sortie: 1,7 A continu (2,5 A crête) par moteur
- La carte peut alimenter en option la base Raspberry Pi directement à l'aide du régulateur additionnel (non inclus)
- La bibliothèque Python facilite la mise en route en utilisant cette carte comme carte d'extension de pilote de moteur
- Les mappages de broches GPIO peuvent être personnalisés si les mappages par défaut ne sont pas pratiques
- Protection contre les inversions de tension sur l'alimentation du moteur
- Verrouillage de sous-tension et protection contre les surintensités et les surchauffes
- Une résistance de montage en surface peut être ajoutée en option pour permettre la limitation automatique du courant
.jpg?1524843074167)
Double driver de moteur MAX14870 pour Raspberry Pi, côtés supérieur et inférieur.
.jpg?1524843114792)
Double Driver Moteur MAX14870 pour Raspberry Pi (version kit) avec matériel inclus.
Le connecteur femelle de 2 "à 17 broches de 0,1" doit être monté au bas de la carte (le côté avec des composants à montage en surface). Une fois soudé, cet en-tête est utilisé pour connecter la carte à l'en-tête GPIO du Raspberry Pi à 40 broches. Alternativement, si vous souhaitez continuer à avoir accès aux 40 broches GPIO du Raspberry Pi alors que la carte du pilote du moteur est branchée, vous pouvez installer un en-tête femelle 2 × 20 broches empilable (non inclus) à la place.
Trois borniers de 5 mm à 2 broches sont inclus pour faciliter les connexions du moteur et de l'alimentation à la carte une fois qu'ils ont été glissés ensemble et soudés aux six grands trous traversants. Alternativement, vous pouvez souder des broches d'en-tête mâles de 0,1 "dans les plus petits trous traversants sous les trous du bornier, ou vous pouvez simplement souder des fils directement sur la carte.
.jpg?1524843226267)
Un Raspberry Pi n'est pas inclus.
Utilisation du pilote de moteur
Cette section explique comment utiliser la carte d'extension de pilote de moteur double MAX14870 et fournit quelques informations de base sur les broches du pilote de moteur pour vous aider à démarrer. Cependant, nous vous encourageons vivement à consulter la fiche technique MAX14870 (pdf 492k) pour des descriptions détaillées des broches, des tables de vérité et des caractéristiques électriques. Cette carte d'extension est essentiellement une carte de dérivation pour deux CI de pilote de moteur MAX14870, de sorte que la feuille de données est votre meilleure ressource pour répondre aux questions non abordées ici.
La carte doit être branchée dans la position la plus à gauche sur l'en-tête GPIO du Raspberry Pi à 40 broches, en laissant six broches à droite, comme indiqué sur l'image ci-dessous.
.jpg?1524843292034)
Dans l'état par défaut de la carte, le pilote du moteur et le Raspberry Pi sont alimentés séparément, bien qu'ils partagent un terrain commun. Lorsqu'il est utilisé de cette façon, le Raspberry Pi doit être alimenté via sa prise USB Micro-B, et la carte du pilote du moteur doit être alimentée de 4,5 V à 36 V grâce à ses grandes pastilles VIN et GND. Cependant, la carte du pilote du moteur fournit un ensemble de trois trous traversants où vous pouvez facilement connecter un régulateur de tension approprié, permettant à l'alimentation du moteur d'alimenter le Raspberry Pi (voir la section Alimentation du Raspberry Pi ci-dessous).
Mappages de broches par défaut
Ce tableau montre comment les broches GPIO du Raspberry Pi sont utilisées pour l'interface avec les pilotes du moteur:
| RPi GPIO pin |
Motor driver pin | Description |
|---|---|---|
| 5 | EN | Inverted enable input: The Raspberry Pi pulls this pin high by default, putting the motor driver IC into a low-current sleep mode and disabling the motor outputs (setting them to high impedance). EN must be driven low to enable the motor driver. |
| 6 | FAULT | Fault output: When the drivers are functioning normally, this pin should be pulled high by the Raspberry Pi. In the event of an over-current or over-temperature condition, the driver IC experiencing the fault drives FAULT low. |
| 12 | Motor 1 PWM | Motor speed input: A PWM (pulse-width modulation) signal on this pin corresponds to a PWM output on the corresponding driver’s motor outputs. When this pin is low, the motor brakes low. When it is high, the motor is on. The maximum allowed PWM frequency is 50 kHz. |
| 13 | Motor 2 PWM | |
| 24 | Motor 1 DIR | Motor direction input: When DIR is low, motor current flows from output A to output B; when DIR is high, current flows from B to A. |
| 25 | Motor 2 DIR |
Table de vérité de commande de moteur simplifiée
Ce tableau montre comment les entrées de commande des pilotes affectent les sorties du moteur:
| Inputs | Outputs | ||||
|---|---|---|---|---|---|
| EN | DIR | PWM | MxA | MxB | operating mode |
| 0 | 0 | PWM | PWM (H/L) | L | forward/brake at speed PWM % |
| 0 | 1 | PWM | L | PWM (H/L) | reverse/brake at speed PWM % |
| 0 | X | 0 | L | L | brake low (outputs shorted to ground) |
| 1 | X | X | Z | Z | coast (outputs off) |
Repères de remappage
Chaque broche GPIO utilisée par la carte est connectée à la broche correspondante du moteur par une trace sur le côté supérieur de la carte couvrant une paire de trous. Si vous voulez remapper l'une de ces broches de pilote de moteur, vous pouvez couper sa trace avec un couteau, puis passer un fil du trou inférieur à une nouvelle broche GPIO.
.jpg?1524843374429)
De plus, les broches EN et FAULT sont connectées entre les deux circuits intégrés du pilote par défaut. Si vous devez accéder aux broches de chaque pilote séparément, vous pouvez couper les traces entre les cavaliers de montage en surface étiquetés "EN" et "FAULT" à côté du logo Pololu sur la carte. Cela laisse le côté droit des cavaliers et les points d'accès d'origine sur la carte connectés aux broches EN et FAULT du moteur 2, tandis que le côté gauche des cavaliers donnera accès aux broches du moteur 1.
Notez que les mappages de broches par défaut ont été choisis de telle sorte que les pull-ups et les pull-down GPIO du Raspberry Pi correspondent à la direction dans laquelle les broches du moteur sont tirées (en haut pour EN et FAULT, en bas pour les autres); Si vous remappez les broches du pilote du moteur sans y prêter attention, vous risquez de rencontrer des problèmes avec les broches tirées dans le mauvais sens. Consultez la documentation de Raspberry Pi pour en savoir plus sur les états GPIO par défaut.
Limitation de courant optionnelle
Le MAX14870 IC dispose d'une entrée SNS pouvant être utilisée pour la limitation de courant automatique en option. Par défaut, cette entrée est connectée à la masse pour les deux pilotes de cette carte, ce qui contourne la fonction de régulation actuelle. Pour activer la limitation de courant, vous devez d'abord couper les traces entre chaque paire de pastilles de résistance 1206 non peuplées sur le côté inférieur de la carte.
.jpg?1524843466057)
Ensuite, vous devrez ajouter votre propre résistance 1206 à montage en surface à ces pads.
.jpg?1524843490342)
Chaque pilote essaie de maintenir la tension sur la broche SNS de plus de 100 mV, par exemple, une résistance de 100 mΩ limite le courant à 1 A et une résistance de 200 mΩ le limite à 0,5 A. Pour plus d'informations sur la limitation de courant, voir Fiche technique MAX14870 (492k pdf).
Alimentation du Raspberry Pi à partir du tableau de bord du moteur
Sur le côté gauche de la carte d'extension se trouve un ensemble de trois broches entourées d'une boîte et étiquetées "5V", "GND" et "VM". La broche 5V est connectée au rail d'alimentation 5V du Raspberry Pi, tandis que la broche VM permet d'accéder à la tension d'alimentation du moteur de la carte pilote après une protection contre les tensions inverses. Si un régulateur de tension approprié est connecté à ces trois broches, il peut générer 5 V pour alimenter le Raspberry Pi à partir de la tension d'alimentation du moteur de la carte.
Nous vous suggérons d'utiliser nos régulateurs abaisseurs de commutation D24V22F5 (2858-POLOLU), qui ont la même tension d'entrée maximale de 36 V que le MAX14870 (voir ci-dessous pour les détails sur lesquels choisir).
Veillez à bien l'orienter: notez que la broche VM du tableau de commande du moteur doit être connectée à la broche VIN du régulateur, tandis que la broche VOUT du régulateur doit être connectée à la broche 5V du tableau de commande du moteur.
Il y a plusieurs considérations à garder à l'esprit lorsque vous alimentez le Raspberry Pi via un régulateur de tension de cette manière:
- Vous ne devez jamais connecter une source d'alimentation différente au Raspberry Pi (y compris via sa prise USB Micro-B) pendant que le régulateur est connecté, car cela créera un court-circuit entre la sortie du régulateur de tension et l'alimentation externe Raspberry Pi, le régulateur, et / ou l'alimentation.
- L'alimentation de votre moteur doit être une tension acceptable à la fois pour votre régulateur et le MAX14870.
- Le régulateur devrait être capable de gérer les besoins en énergie du Raspberry Pi. Le Raspberry Pi utilise généralement quelques centaines de milliampères à 5 V (selon le modèle spécifique), bien que sa consommation de courant puisse dépasser 1 A s'il alimente également des périphériques USB et d'autres périphériques. Tandis que les régulateurs linéaires comme un 7805 pourraient tenir dans l'emplacement de montage du régulateur, ils pourraient générer une chaleur excessive ou s'arrêter à des tensions d'entrée et des courants de sortie plus élevés, nous recommandons donc d'utiliser un régulateur de commutation. Nous suggérons d'utiliser l'un des régulateurs suivants.
Branché sur une embase femelle à 3 broches soudée à la carte pour une configuration plus modulaire:
.jpg?1524845842558)
Le D24V22F5 (2858-POLOLU) peut fournir jusqu'à 2,5 A et est plus adapté aux modèles Raspberry Pi plus performants (comme le Pi 3 B), en particulier pour les charges de travail exigeantes ou lors de l'alimentation de nombreux périphériques. En raison de sa plus grande taille, il doit être connecté par des collecteurs ou des fils plus longs pour éviter toute interférence avec les borniers.
.jpg?1524845908127)
La page FAQ sur le site Raspberry Pi a plus d'informations sur les besoins en alimentation de Raspberry Pi.
Considérations de dissipation de puissance dans le monde réel
La fiche technique MAX14870 recommande un courant continu maximal de 2,5 A. Cependant, la puce elle-même surchauffera généralement à des courants plus faibles. Dans nos tests, un courant continu de 1,7 A par canal a été durable pendant de nombreuses minutes sans déclencher un arrêt thermique.
Le courant réel que vous pouvez délivrer dépendra de la capacité du moteur à refroidir. La carte de circuit imprimé du conducteur est conçue pour aider à cela en retirant la chaleur de la puce du pilote du moteur. PWMing le moteur introduira un chauffage supplémentaire proportionnel à la fréquence.
Ce produit peut devenir assez chaud pour vous brûler longtemps avant que la puce ne surchauffe. Soyez prudent lorsque vous manipulez ce produit et d'autres composants qui y sont connectés.
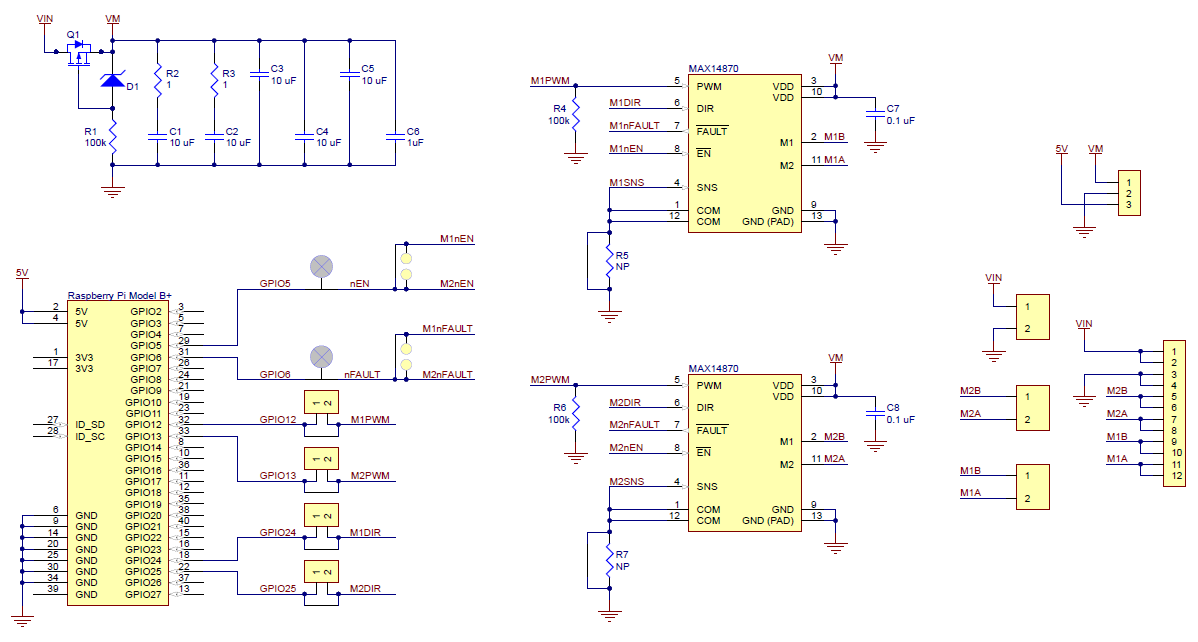
Diagramme schématique
.jpg?1524846005073)
Schéma de principe pour le pilote de moteur Dual MAX14870 pour Raspberry Pi
Ce schéma est également disponible en format pdf téléchargeable (pdf 134k).


