


3110-0002-0002, Ordinateur d’odométrie Pinpoint V2 (Fusion IMU pour odométrie 2 roues)
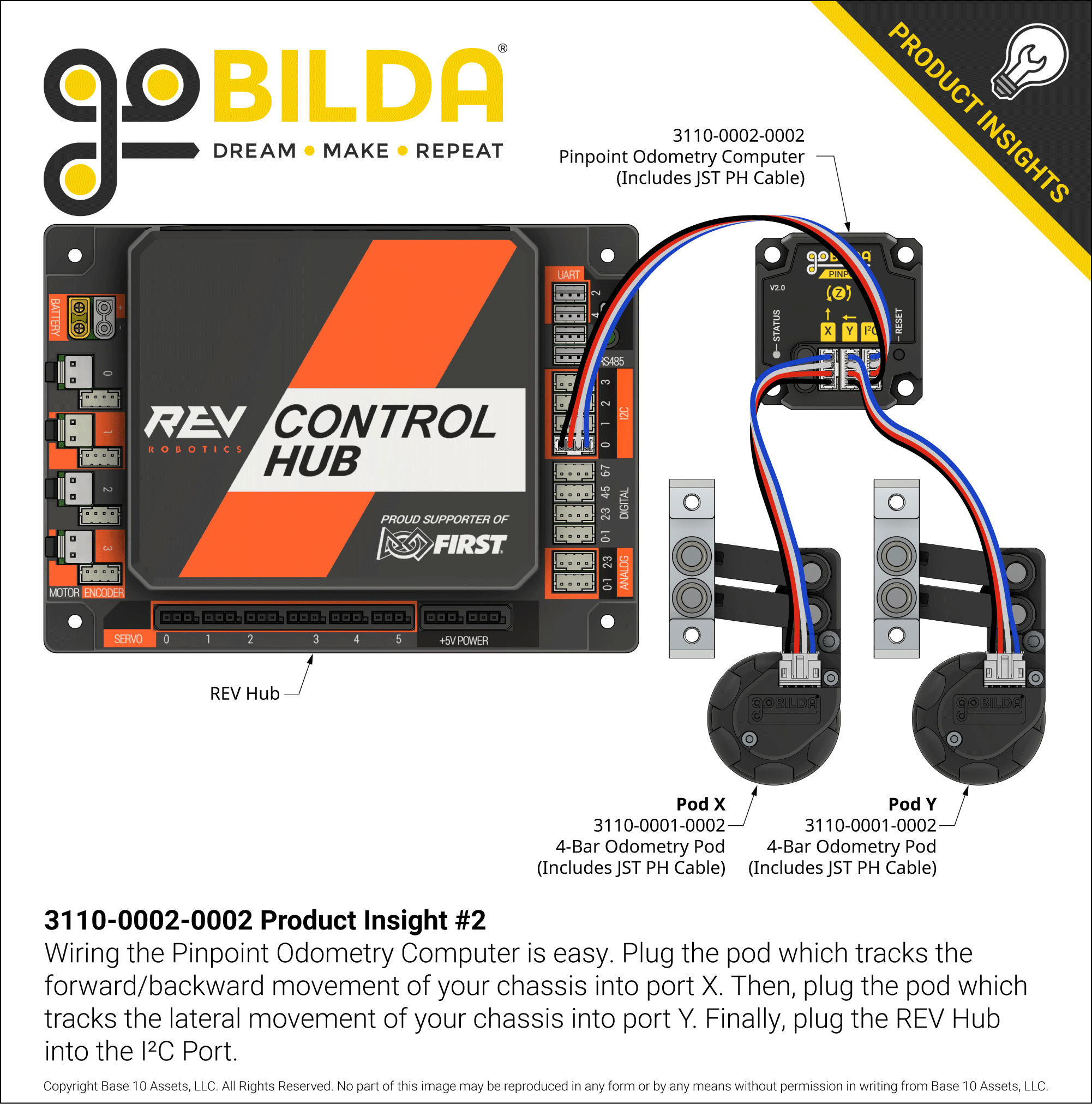
Aidez votre robot à savoir exactement où il se trouve avec l’ordinateur d’odométrie Pinpoint ! Ce coprocesseur réalise la fusion de capteurs entre deux pods d’odométrie à roue morte et une IMU intégrée afin de localiser votre robot avec une précision chirurgicale. Il renvoie la position estimée du robot au contrôleur via I²C, vous donnant accès aux données en un clin d’œil.
Conçu spécifiquement pour l’odométrie en FTC, le Pinpoint atteint deux objectifs essentiels :
1. Facilité d’utilisation
Le Pinpoint rend l’odométrie plus simple que jamais à implémenter sur votre robot. Ayant écouté les retours d’équipes souhaitant exploiter pleinement l’odométrie, l’équipe R&D de goBILDA® s’est concentrée sur les points douloureux qui génèrent des imprécisions dans la localisation par roue morte. Le résultat : un produit qui laisse derrière lui des heures de réglages fastidieux.
Presque tous les réglages sont faits pour vous lorsque vous utilisez deux pods d’odométrie et l’IMU d’une précision redoutable du Pinpoint. Il suffit de lui indiquer le type de pods que vous avez — et, facultativement, où ils sont montés sur votre robot.
2. Précision Pinpoint
Plus qu’un simple appareil facile à utiliser, le Pinpoint mérite son nom par son extrême précision. C’est un coprocesseur conçu spécifiquement pour l’odométrie par roues mortes, ce qui en fait le système d’odométrie par roue morte le plus précis que vous puissiez acheter ! Il tire parti de deux avantages majeurs par rapport à la plupart des systèmes d’odométrie :
Taux de rafraîchissement : Le puissant processeur interne permet un traitement extrêmement rapide. Au lieu d’estimer votre position toutes les 0,01 à 0,03 secondes, le Pinpoint estime la position de votre robot toutes les 0,00065 secondes. Autrement dit : tandis que la plupart des systèmes d’odométrie FTC fonctionnent à 100–300 Hz, le Pinpoint opère à 1 500 Hz. La réduction de la distance parcourue entre deux lectures diminue drastiquement l’erreur et permet à l’algorithme d’estimation de pose à vitesse constante du Pinpoint de donner son plein potentiel. Cela vous permet également de pousser votre robot plus vite que jamais !
Cap (heading) : Obtenir une estimation précise de la direction absolue que pointe votre robot est l’un des éléments les plus importants de l’estimation de pose (pose estimation) qui détermine où se trouve votre robot sur le terrain. Au lieu de dépendre d’un troisième pod d’odométrie, le Pinpoint intègre une unité de mesure inertielle (IMU) d’une précision étonnante qui en fait une solution d’odométrie complètement plug-and-play que vous pouvez installer directement sur votre robot ! Non seulement l’algorithme de fusion de capteurs est intégré et optimisé pour la FTC, mais l’IMU de chaque Pinpoint est pré-étalonnée avant expédition. Alors que l’IMU STM de haute qualité (associée à notre algorithme de cap) sortait de l’usine avec un potentiel d’erreur d’environ 0,1 %, nous l’affinons jusqu’à 0,002 %. Vous pouvez considérer la précision du Pinpoint comme quasi « philosophique » — cette IMU fournit la « Vérité » avec un grand V !
Nouveautés de la V2 !
Cet ordinateur d’odométrie est la version V2 du Pinpoint. Les améliorations apportées en V2 étendent considérablement la sécurité, la portée et la personnalisation des données que reçoit votre robot !
- Protection CRC des données – Le Pinpoint utilise désormais la détection d’erreur CRC8 pour empêcher les interférences sur la ligne I²C d’engendrer des lectures erronées ! Le Pinpoint calcule une valeur à partir des données envoyées et l’envoie avec les données. Le contrôleur I²C effectue le même calcul et vérifie que les deux valeurs concordent. Si ce n’est pas le cas, une erreur de transmission est détectée et l’hôte peut décider de la suite à donner.
- Estimation d’orientation 3D complète – Vous pouvez désormais exploiter l’excellente IMU intégrée du Pinpoint pour mesurer l’orientation du robot en tangage (pitch) et roulis (roll) ! Et si vous effectuez des manœuvres plus complexes, vous pouvez demander l’orientation du Pinpoint au format Quaternion.
- Fenêtres de lecture en bloc configurables par l’utilisateur – Vous pouvez maintenant personnaliser précisément les données que vous souhaitez recevoir du Pinpoint à chaque boucle ! Voulez-vous vérifier le roulis pour garder votre robot bien droit ? Souhaitez-vous réduire les données et ne recevoir que le minimum nécessaire pour maximiser le temps de boucle du contrôleur ? Le contrôle est entièrement entre vos mains !
Vous trouverez également un nouveau port USB ! Cette addition offre la possibilité de mises à jour du firmware à l’avenir.
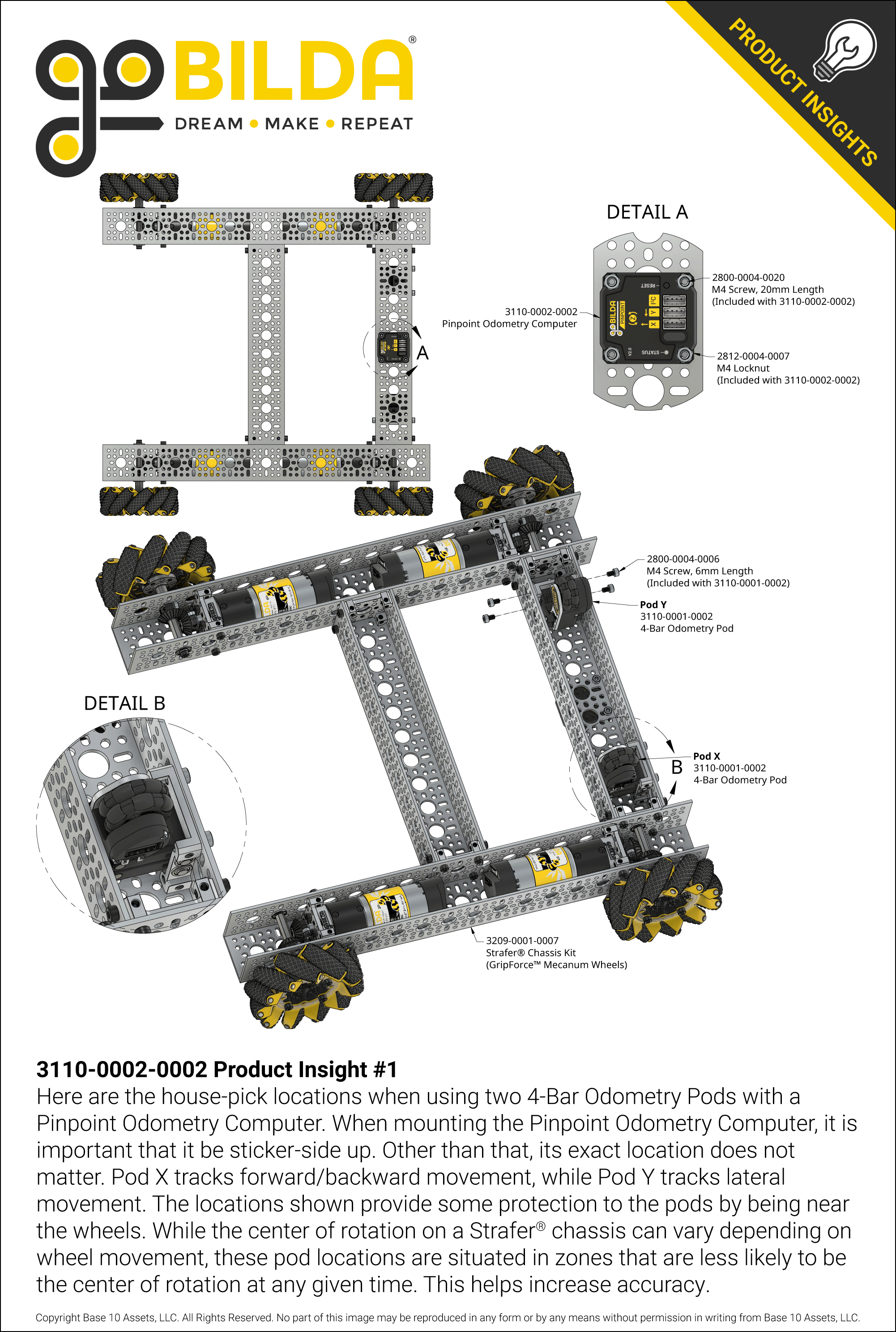
Préférable avec les pods goBILDA®
Les pods d’odométrie goBILDA® sont réglés spécifiquement pour la FTC, et les utiliser évite une étape de calage supplémentaire. Grâce à leurs roues omni adhérentes, leur conception sans engrenage, leur encodeur intégré et la tension de ressort ajustée en usine, les pods goBILDA® n’exigent pas de réglage de la distance parcourue. Il suffit de les boulonner sur votre robot et c’est parti !
Évidemment, même si le Pinpoint est conçu pour être utilisé avec les pods goBILDA®, il est compatible avec tout système à roue morte utilisant des encodeurs incrémentaux (quadrature). Le décodeur quadrature matériel du Pinpoint garantit que, même avec des encodeurs de très haute résolution, le Pinpoint compte chaque impulsion consciencieusement, quelle que soit la vitesse.
Codes d’état :
Le Pinpoint Odometry Computer peut être dans plusieurs états. La couleur de la LED d’état embarquée et le statut du périphérique, consultable via la télémétrie, vous aident à identifier l’état courant de l’ordinateur.
| LED d’état | Nom & description du statut |
|---|---|
| Vert |
READY L’appareil fonctionne normalement. |
| Rouge |
CALIBRATING L’appareil est en cours d’étalonnage et les sorties sont suspendues. |
| Rouge |
NOT_READY L’appareil est en train de redémarrer entièrement. Cela ne devrait se produire qu’après une coupure/rebranchement d’alimentation. |
| Violet |
FAULT_NO_PODS_DETECTED Le dispositif ne détecte aucun pod branché. |
| Bleu |
FAULT_X_POD_NOT_DETECTED Le dispositif ne détecte pas de pod X branché. |
| Orange |
FAULT_Y_POD_NOT_DETECTED Le dispositif ne détecte pas de pod Y branché. |


