

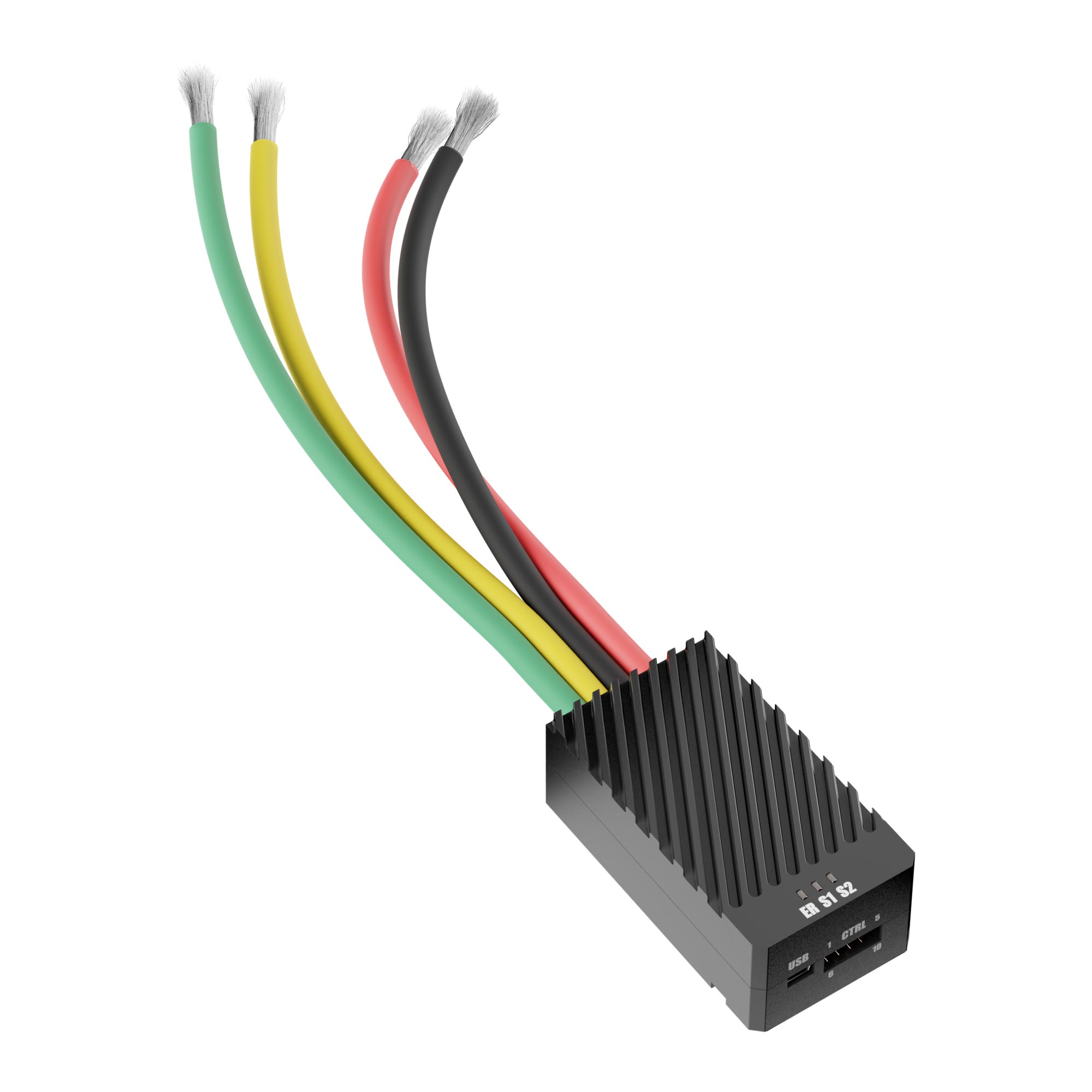
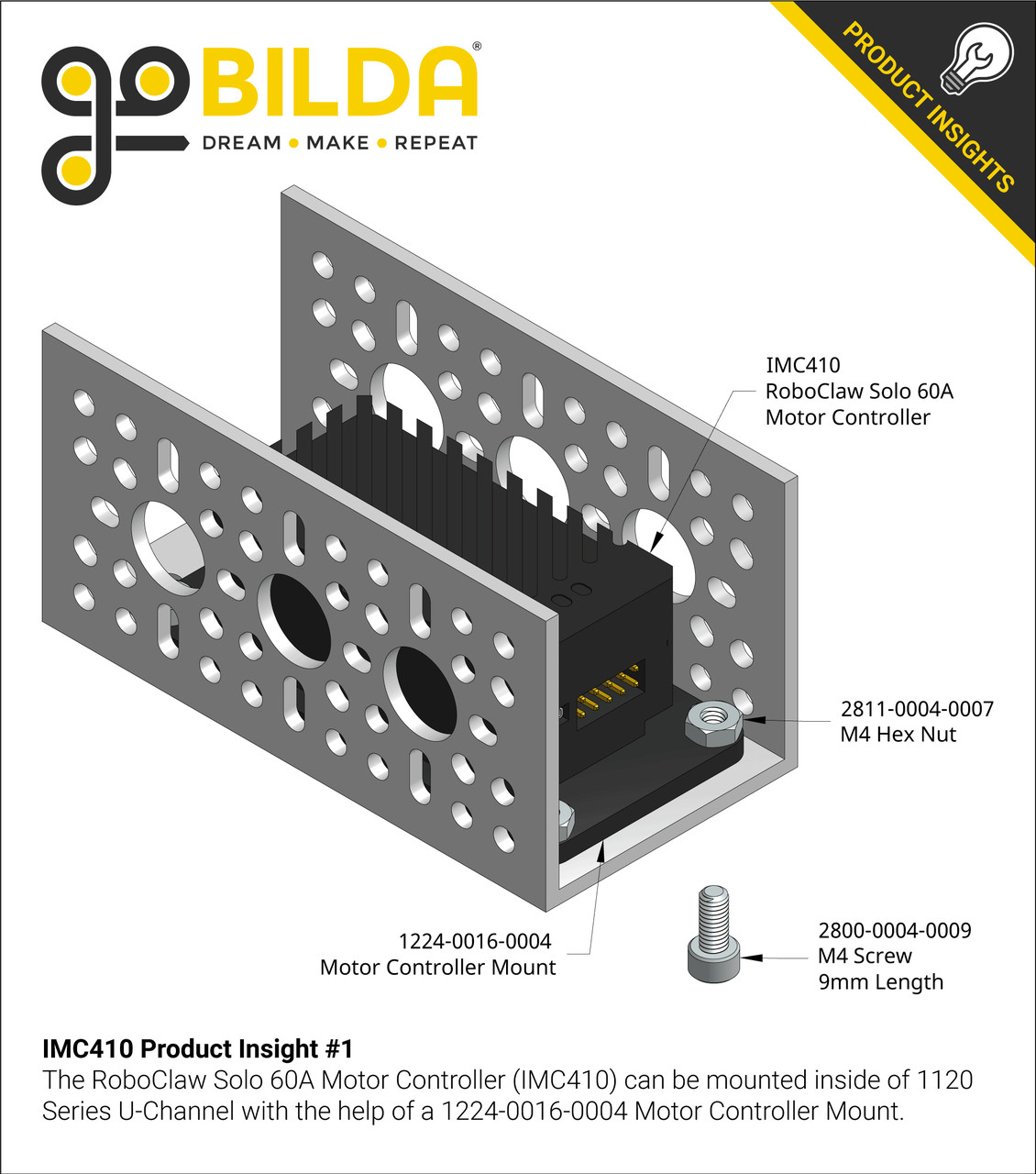
IMC410, RoboClaw Solo 60A Contrôleur de Moteur
Le RoboClaw Solo 60 A est un contrôleur de moteur intelligent conçu pour contrôler un moteur à courant continu (DC) brossé avec 60 ampères en continu et jusqu’à 100 ampères en pointe. Il peut être contrôlé via USB, radio RC, PWM, série TTL, analogique et par des microcontrôleurs tels qu’un Arduino ou un Raspberry Pi.
RoboClaw prend automatiquement en charge les niveaux logiques 3,3 V ou 5 V, les interrupteurs de fin de course, les interrupteurs de position d’origine, les interrupteurs d’arrêt d’urgence, les alimentations, les systèmes de freinage et les contacteurs. Les alimentations peuvent être utilisées en activant la fonction intégrée de limitation de tension. Un BEC à découpage intégré fournit 5 VDC jusqu’à 1,2 ampères pour alimenter vos dispositifs externes.
Les moteurs DC brossés peuvent être contrôlés en boucle ouverte ou fermée, en utilisant des modes de contrôle de position ou de vitesse. RoboClaw propose plusieurs commandes intégrées pour gérer l’accélération, la décélération, la distance, la vitesse, la détection de courant, les limites de tension et plus encore. Les modes de contrôle RC et analogique incluent également plusieurs paramètres définis par l’utilisateur, tels que les vitesses d’accélération et de décélération.
Les encodeurs quadrature doubles jusqu’à 19,6 millions d’impulsions par seconde sont pris en charge et peuvent être auto-calibrés à l’aide d’Ion Studio, une application gratuite téléchargeable. De plus, une large gamme d’entrées capteurs, incluant des potentiomètres et des encodeurs absolus, est prise en charge. La fonctionnalité en boucle fermée du RoboClaw assure un contrôle absolu de la vitesse, de l’accélération et de la direction, indépendamment des variations de charge.
RoboClaw intègre plusieurs fonctions de protection, notamment des limites de température, de courant, de surtension et de sous-tension. Ces fonctions sont auto-surveillées et protègent RoboClaw contre les dommages dans toutes les conditions de fonctionnement. Plusieurs paramètres configurables par l’utilisateur, tels que la limite de courant maximale et les tensions minimale et maximale de batterie, sont disponibles pour un contrôle plus précis.
La capacité régénérative du RoboClaw recharge la batterie d’alimentation lors des ralentissements ou du freinage. Son circuit avancé peut même changer de direction à plein régime sans dommage ! RoboClaw intègre également un mode de coupure LiPo pour éviter d’endommager les batteries.
Caractéristiques :
| Canaux du Pont | Oui |
|---|---|
| Sorties 3,3 V Sécurisées | Oui |
| Entrées Tolérantes 5 V | Oui |
| Auto-calibration de l’Encodeur | Oui |
| Protection Thermique | Oui |
| Détection de Courant | Oui |
| Courant de Pointe Sélectionnable | Oui |
| Protection de la Batterie | Oui |
| Freinage Régénératif | Oui |
| Protection contre les Surtensions | Oui |
| Protection contre les Sous-tensions | Oui |
| Auto-Diagnostic | Oui |
| Mode de Contrôle de Position | Oui |
| Mode de Contrôle de Vitesse | Oui |
| Méthodes de Contrôle | USB, RC, PWM, série TTL, analogique et microcontrôleur |
Conseils Techniques :
- Code Source C# :
- Paramètres Motion Studio :
- Arduino :
- Raspberry Pi :
Spécifications
| Canaux Moteur | 1 |
|---|---|
| Poids | 126 g |
| Courant Continu Max par Canal | 60 A |
| Courant de Pointe Max par Canal | 100 A |
| Tension Max | 34 VDC |
| BEC | 5 VDC @ 1.2 A |
| Compatibilité Moteur | DC Brossé |
| Compatibilité Encodeur | Relatif et Absolu |
| Direction du Moteur | Bidirectionnelle |


