


Le JGA12-N20 6V 500 RPM Micro Moteur à Courant Continu à Aimant Permanent avec Réducteur est un moteur CC compact à grande vitesse, équipé d’un encodeur quadrature à effet Hall intégré. Sa petite taille, son engrenage métallique et le retour d’information de l’encodeur le rendent idéal pour la robotique, l’automatisation, les dispositifs intelligents et les projets électroniques DIY nécessitant un contrôle précis de la vitesse et de la position.
Le moteur prend en charge la rotation bidirectionnelle (horaire/anti-horaire) et peut être facilement piloté à l’aide de drivers de moteur H-bridge courants tels que L298N, L9110S ou TB6612FNG. Il est entièrement compatible avec les microcontrôleurs populaires tels qu’Arduino, Raspberry Pi et ESP32, avec contrôle de la vitesse et de la direction via des signaux PWM.
Spécifications du moteur
- Type de moteur: JGA12-N20
- Tension nominale: 6 VDC
- Plage de tension de fonctionnement: DC 5–6 V
- Matériau de l’engrenage: boîte de vitesses entièrement métallique
- Vitesse nominale (sans charge): 500 RPM @ 6 V
- Vitesse à rendement maximal: ~384 RPM
- Couple de blocage: 135 g·cm
- Couple nominal: 45 g·cm
- Courant à vide: 0.05 A
- Courant à rendement maximal: 0.12 A
- Courant de blocage: 0.43 A
- Rapport de réduction: 30:1
- Tolérance de vitesse: ±15 % (sans charge)
- Direction: CW/CCW (prise en charge du sens inverse)
- Température de fonctionnement: −20 °C à +70 °C
Détails mécaniques
- Dimensions totales: 40.5 × 12 × 10 mm
- Diamètre de l’arbre: 3 mm
- Longueur de l’arbre: 10 mm
- Fixation: vis M3
- Poids: 13 g
Spécifications de l’encodeur
- Type d’encodeur: encodeur magnétique incrémental biphasé AB à effet Hall
- Impulsions de base: 7 PPR × rapport de réduction de l’engrenage
- Anneau magnétique: 14 pôles (7 paires de pôles)
- Signal de sortie: onde carrée quadrature (phase A/B)
- Fréquence de réponse: jusqu’à 100 kHz
- Tension d’alimentation: DC 3.3 V/5.0 V
- Interface: connecteur ZH1.5-6PIN
- Résistances pull-up intégrées: oui (connexion directe au MCU)
- Longueur du câble: 150 mm (6 fils)
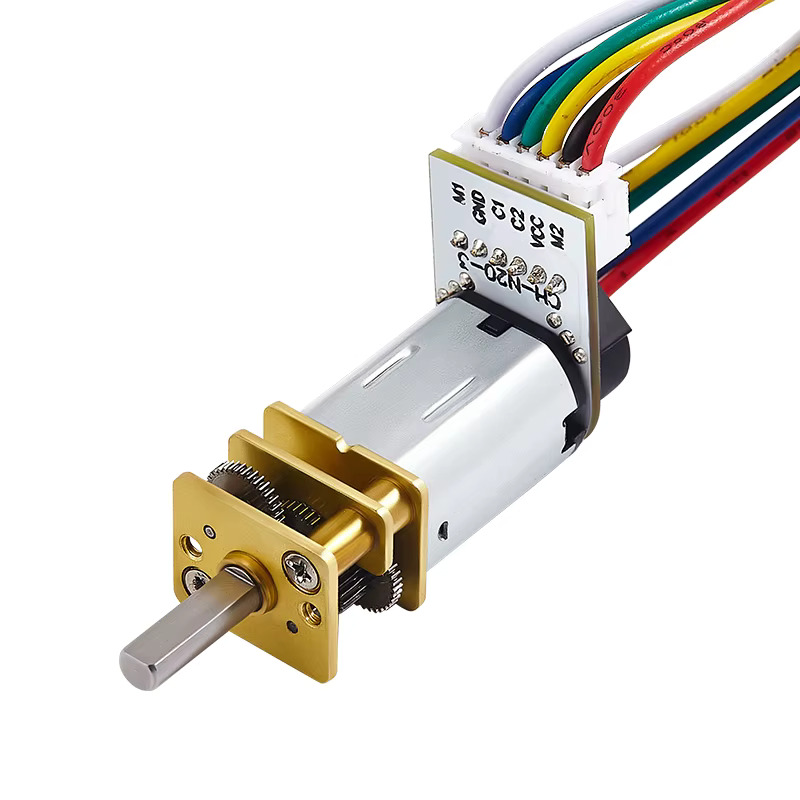
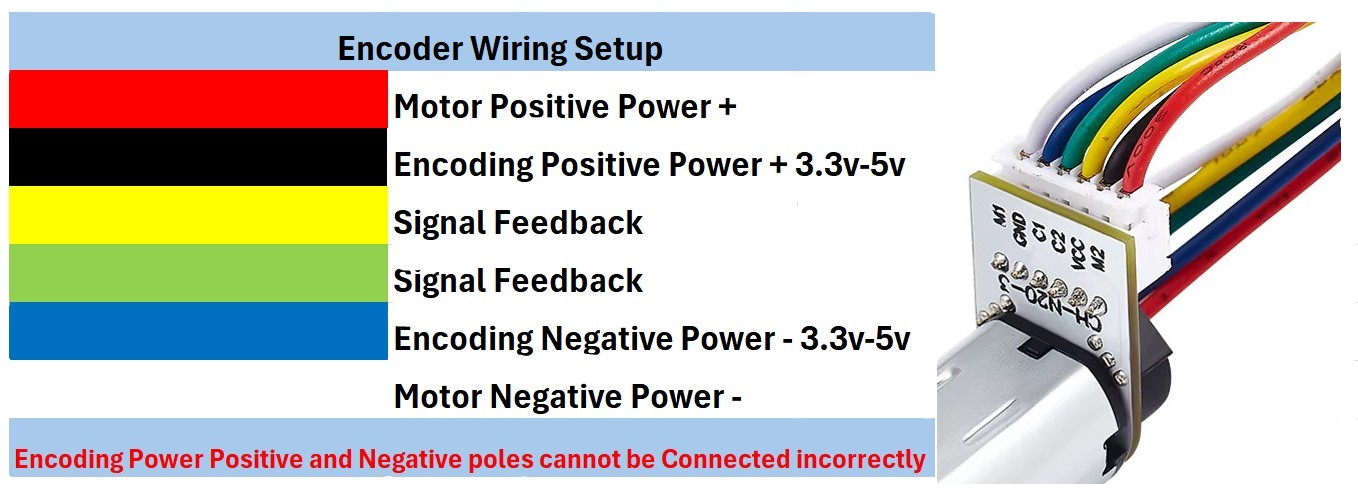
Câblage et fonctionnement de l’encodeur
Le moteur utilise un câble à 6 fils qui sépare l’alimentation du moteur de l’alimentation et des lignes de signal de l’encodeur, garantissant un fonctionnement sûr et fiable :
- Rouge (M2): alimentation positive du moteur (+)
- Blanc (M1): alimentation négative du moteur (−)
- Noir (VCC): alimentation positive de l’encodeur (+3,3 V–5 V)
- Bleu (GND): masse de l’encodeur (0 V)
- Vert (C1): sortie du signal du canal A de l’encodeur
- Jaune (C2): sortie du signal du canal B de l’encodeur
Important: la polarité de l’alimentation de l’encodeur doit être connectée correctement. Inverser VCC et GND peut endommager définitivement l’encodeur Hall.
Explication des signaux de l’encodeur (C1 & C2)
- L’encodeur intégré génère deux signaux numériques, C1 et C2, similaires en fréquence mais déphasés de 90°. C’est ce qu’on appelle l’encodage quadrature.
- Les deux canaux C1 et C2 produisent des impulsions carrées pendant la rotation du moteur.
- Le comptage des impulsions permet de calculer la vitesse et le mouvement rotatif du moteur.
- L’ordre dans lequel C1 et C2 changent d’état détermine la direction :
- Si C1 précède C2 → rotation dans un sens.
- Si C2 précède C1 → rotation dans le sens inverse.
- En lisant les deux canaux simultanément, un contrôleur peut déterminer avec précision la vitesse, la direction et la position relative, permettant un contrôle précis du mouvement, de l’odométrie et de la régulation de vitesse PID.
Applications
- Robots mobiles et robots suiveurs de ligne
- Roues encodées et systèmes de retour d’information de vitesse
- Serrures intelligentes et actionneurs
- Projets électroniques et d’automatisation DIY


